Focus Projects
In a focus project, students develop and build a prototype from start to real-world deployment. The students are working in teams, where they learn how to structure problems and identify solutions to them, perform system analysis and simulation, and learn to present and document.
Furthermore, the students will build the product with access to rapid prototyping facilities, a machine shop, and state of the art engineering tools. Below, you can find a description of the currently offered and past focus projects of the Soft Robotics Lab.
NOCTUA focus project ('23-'24)

Mission
Wildlife reserves struggle with managing poaching and monitoring animal populations due to the lack of sufficient surveillance solutions. The project NOCTUA tackles this problem by developing a silent, long-endurance drone that can autonomously and unobtrusively monitor animals and large areas, supporting rangers in preserving wildlife.
Poaching in Vast, Remote Game Parks
According to the “Save the Rhino Foundation”, Kruger National Park in South Africa has witnessed a 59 percent decline in the rhino population since 2013, emphasizing the urgent need for solutions. The primary challenge faced by wildlife reserves is the ability to monitor these vast and remote areas. For instance: 600 rangers are currently on ground patrol in the Kruger National Park, but with the park being half the size of Switzerland only a fraction of the required area is covered. Additionally, poachers usually strike during the night, in low-light conditions, making it even more difficult for the rangers to detect illegal activity.
The Rangers’ Silent Eye In the Sky
Covering large areas both day and night and detecting poachers during low light conditions make aerial drones an effective solution. They achieve this coverage by combining visual and thermal cameras with smart software that can automatically identify and notify about human and animal activity in the park. However, the drone must operate silently to avoid detection by both wildlife and poachers. Noise disturbance can cause serious distress to wildlife. The drone must also have long-endurance and long-range capabilities to effectively perform its mission in these large areas. Attributes that are currently not available to the rangers in this combination. That is why, in close collaboration with the external page Max Planck Institute of Animal Behavior and rangers from South Africa and Namibia, the NOCTUA team designed and built a drone to be capable of monitoring large areas and animals for 12 hours straight.
Thanks to an innovative combination of electrical propulsion and fuel cell technology, NOCTUA achieves silent operation. This makes an effective tool for rangers in their fight against poaching and for researchers like the Max Planck Institute to perform long-term animal monitoring and retrieval of data collected by their trackers.
Support the deployment in Africa!
For a future where wildlife can thrive, the next stop is Africa! Together with the Max Planck Institute, the team is currently refining the platform for field testing in the coming fall/winter, and needs your funding to make it happen! We want to create a future where technology and wildlife conservation unite. If you would like to support the continuation of this focus project in any way, please contact our supervising Professor: Prof. Robert Katzschmann ()
Your support is vital as we strive to engineer a system that could empower rangers, protect endangered species, and help preserve the biodiversity of our planet.
Noctua Student Team: Mark Benazet Castells, Nicola Fiore, Yegor Gorodzha, Alfonso Maculan, Diego Malsiner, Jakob Marten, Raffael Meier, Simone Morandi, Felix Müller, Nick Truttmann
Noctua Supervision Team: Benedek Forrai, Marc Blöchlinger, Pascal Strauch, Prof. Dr. Robert Katzschmann
NOCTUA website is here
SARA focus project ('23-'24)

The field of prosthetics has seen major leaps in the recent years; however, upper-limb prostheses are still frequently perceived as being too heavy. The SARA Focus project therefore aims to construct a lightweight and flexible robotic arm that can be further developed into a prosthesis. The vision of the SARA focus project team is for users of prostheses to be barely aware of their disadvantages in the future.
With the development of a musculuoskeletal robotic arm, the team plans to pave the way for a new generation of lightweight, agile and silent prostheses. Instead of conventional actuators, the students are making use of a new robotics technology called HASEL actuators that copies how human muscles work. The actuators – in other words, the elements that generate movement – consist of liquids in thin plastic films that convert electrical into mechanical energy. By integrating artificial muscles into the arm prosthesis, the stuent team aims to make the latter more agile and at the same time more lightweight.
Team: Aiden Fernández Hernández, Dan Meister, Emma Hatt, Gianluca Fischer, Ivan Robuschi, Leon Auspurg, Masiar Etemadi, Patrick Müller, Simon Widmer, Timon Mettler
Supervisors: Amirhossein Kazemipour, Alexander Kübler, Stephan Gravert, Robert Katzschmann
SARA website is here
SURF-eDNA focus project ('22-'23)

The rapidly changing climate and overfishing has caused harm to marine habitats and their biodiversity. To understand these changes marine scientists -- such as Prof. Loïc Pellissier at ETH Zurich -- survey populations and build environmental models on collected data. Data collection is primarily done by humans and camera traps, limiting data density. Sparse data makes establishing population models harder and the outcome less precise, so an autonomous collection method that does not interfere with the wildlife would be sought after.
The project SURF-eDNA aims to solve automatic marine data collection by applying recent advances in underwater soft robots. the team constructed a modified version of Prof. Dr. Robert Katzschmann’s robotic fish, called SoFi, that can autonomously collect data, namely, high-definition video data and eDNA traces, without substantially disturbing marine life. Prof. Pellisier provides the project with filters and the means of evaluating the eDNA. The robot can carry a filtering device, a camera, and a sonar around a given trajectory. The robot then periodically resurfaces, so that the data can be retrieved, and the batteries are recharged. First dives in Zurich and the shores of Tuscany already happened and more dives are to come.
SURF-eDNA website is here
MetaSuit focus project ('22-'23)

Augmented reality (AR) and virtual reality (VR) experiences will play an important role in the coming decade. Technology companies such as Meta, Alphabet, and Microsoft are investing in virtual-reality spaces in which users can interact with a computer-generated environment (e.g., the Metaverse). These developments depend on AR and VR hardware, which have recently entered the mass market and are becoming affordable to a wider audience. Pose estimation of the user and therefore the ability to naturally interact with the virtual world is still a challenge. Current systems are based on handheld devices or vision based pose sensors. This hinders adoption and usage outside of predefined AR/VR spaces.
The student team wants to make virtual reality (VR) a full-body experience: they are developing a suit complete with artificial muscles. Wearers can immerse themselves in virtual worlds and get haptic feedback – for instance, by feeling resistance on their arms. The students investigate new actuator sensor designs based on capacitive electrohydraulic actuators. Those actuators and sensors are soft, potentially inexpensive, and fast to manufacture. Besides the sensor/actuator units, the project team also miniaturized the readout electronics for the sensors. The result is a modular, easily adaptable sensor system that can be embedded in clothing. The team developed a sensorized piece of clothing that allows for pose estimation and actuation. The system is comfortable to wear for a long time, unobtrusive to natural motions, cheap and fast to manufacture, and can be used in an AR and VR setting. In this way, the suit opens up new VR experiences that could be attractive to the film industry as well as to the medical sector for rehabilitation treatments.
MetaSuit website is here
RAPTOR focus project ('21-'22)
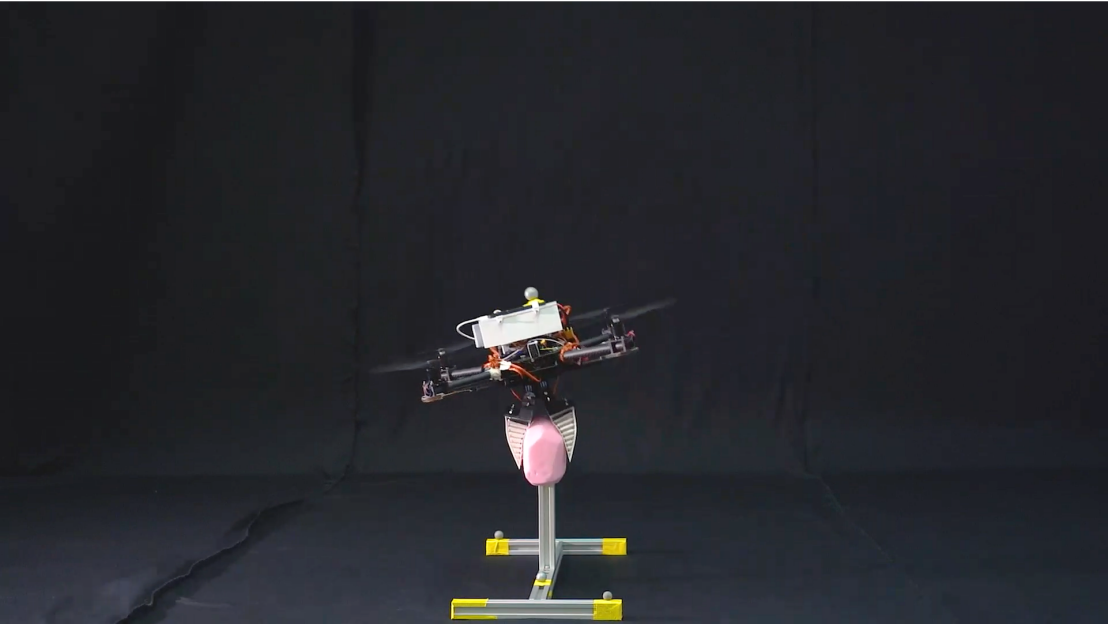
Rapid aerial grasping through robots can lead to many applications that utilize fast and dynamic picking and placing of objects. Rigid grippers traditionally used in aerial manipulators require high precision and specific object geometries for successful grasping. The focus project developed RAPTOR, a quadcopter platform combined with a custom Fin Ray gripper to enable more flexible grasping of objects with different geometries, leveraging the properties of soft materials to increase the contact surface between the gripper and the objects. To reduce the communication latency, the team presented a new lightweight middleware solution based on Fast DDS (Data Distribution Service) as an alternative to ROS (Robot Operating System). The team showed that RAPTOR achieves an average of 83% grasping efficacy in a real-world setting for four different object geometries while moving at an average velocity of 1 m/s during grasping. In a high-velocity setting, RAPTOR supports up to four times the payload compared to previous works. The final results highlight the potential of aerial drones in automated warehouses and other manipulation applications where speed, swiftness, and robustness are essential while operating in hard-to-reach places.
RAPTOR Publications
Appius, Aurel X., Erik Bauer, Marc Blöchlinger, Aashi Kalra, Robin Oberson, Arman Raayatsanati, Pascal Strauch, Sarath Suresh, Marco von Salis, and Robert K. Katzschmann. "Raptor: Rapid aerial pickup and transport of objects by robots." In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 349-355. IEEE, 2022.
external page Paper Link
Bauer, Erik, Barnabas Gavin Cangan, and Robert K. Katzschmann. "Autonomous Marker-Less Rapid Aerial Grasping." In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 6395-6402. IEEE, 2023.
external page Paper Link
RAPTOR website is here