High-Frequency Capacitive Sensing for Electrohydraulic Soft Actuators
Pioneering the future of soft robotics with high-frequency capacitive sensing for unparalleled adaptability and precision.
Introduction
As robotics technology advances, the demand for adaptable and versatile robotic systems has never been greater. Traditional rigid actuators often fall short when tasks require gentle interaction or adaptability to complex environments. To bridge this gap, our team at the Soft Robotics Lab has been exploring innovative solutions in soft robotics.
One such innovation is the Hydraulically Amplified Self-Healing Electrostatic (HASEL) actuator. With its inherent softness and flexibility, the HASEL actuator mimics natural muscle movements, making it ideal for applications that involve delicate interactions or require a high degree of compliance.
Our Research
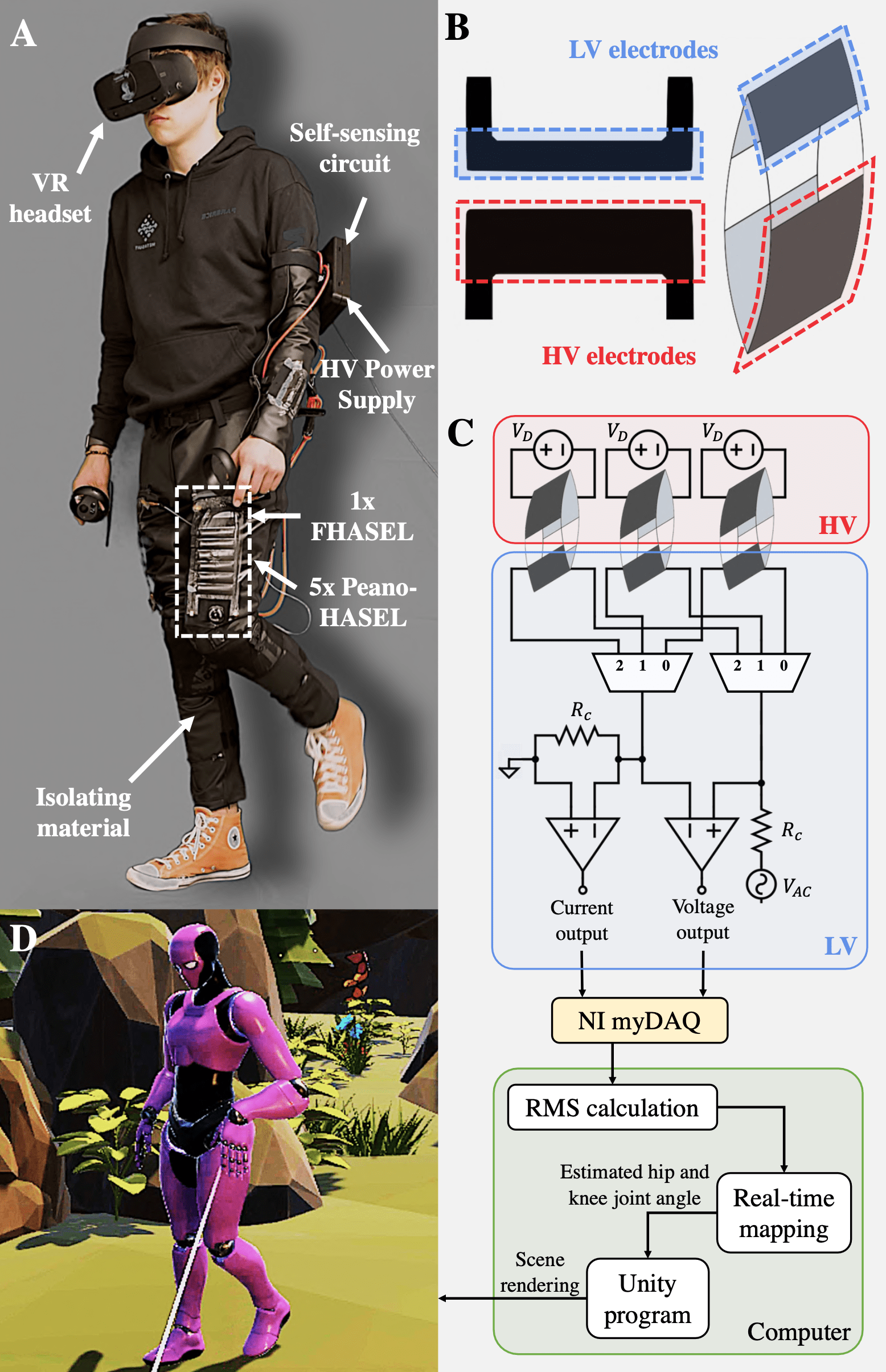
In our recent paper presented at IROS 2024, we introduce the F-HASEL actuator, an advancement over the traditional Peano-HASEL design. The F-HASEL actuator incorporates an additional pair of electrodes dedicated solely to capacitive sensing. This design effectively decouples the actuation and sensing mechanisms, allowing for more accurate displacement estimation without the need for external sensors.
Key Achievements:
- High-Frequency Actuation: Demonstrated accurate displacement estimation during actuation frequencies up to 20 Hz, a significant improvement over the previous 1 Hz limitation.
- Miniaturized Circuitry: Developed compact, low-cost circuitry using off-the-shelf components and a miniature high-voltage power supply.
- High-Frequency External Force Detection: Enabled the actuator to accurately detect deformations caused by high-frequency external forces, enhancing interaction with unpredictable environments.
- Quasi-Simultaneous Multi-Actuator Sensing: Implemented a quasi-simultaneous sensing method by switching through one HASEL at a time. This approach significantly reduces the required circuitry compared to using separate sensing circuits for each HASEL, achieving compactness at the cost of update rate.
- Wearable Application Demonstration: Showcased real-time tracking of a virtual reality user’s joint rotations, highlighting the actuator’s potential in interactive technologies.
Impact and Future Applications
The advancements in the F-HASEL actuator have significant implications across various fields. By enabling high-frequency, precise sensing in a soft actuator, we can enhance robotic proprioception, improve human-computer interaction through wearable devices, and develop more responsive medical and assistive technologies. This technology paves the way for robots that are safer and more adaptable in dynamic environments, benefiting industries ranging from healthcare to virtual reality.
Conclusion
The F-HASEL actuator represents a significant step forward in soft robotics, combining high-frequency actuation with precise sensing in a compact form. By eliminating the need for external sensors and enabling high-speed operation, we’ve opened up new possibilities for robots that are more responsive, adaptable, and capable of interacting safely with their environment.