Low-voltage electrohydraulic actuators for untethered robotics
A hydraulically amplified low-voltage electrostatic (HALVE) actuator that matches mammalian skeletal muscles in average power density (50.5 watts per kilogram) and peak strain rate (971% per second) at a 4.9 times lower driving voltage (1100 volts) compared to the state of the art.
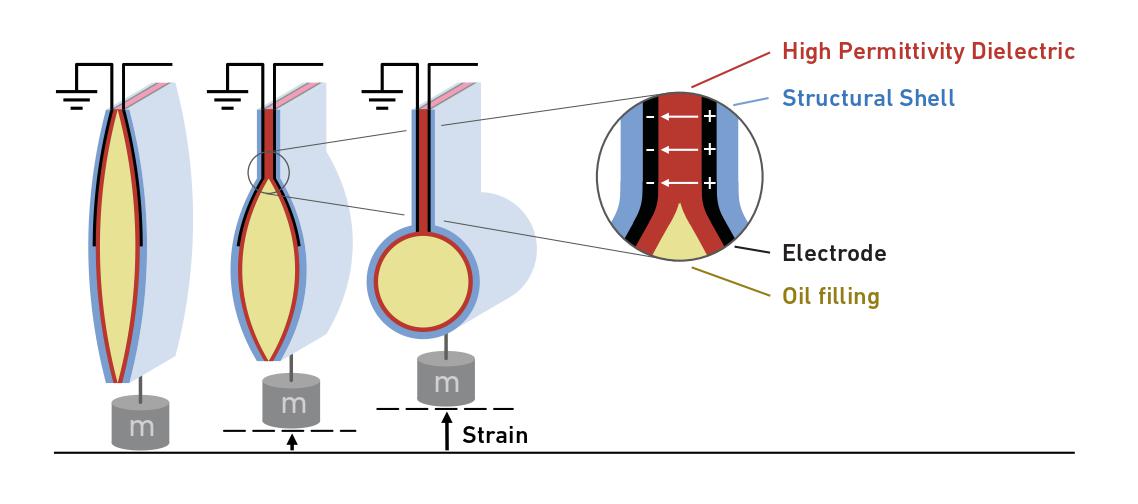
The HALVE Artificial Muscles are lightweight, robust, and safe, designed with a novel shell structure and powered by low-voltage electrostatic technology. Their use of high-permittivity ferroelectric material allows for efficient energy storage and lower power requirements, making them ideal for applications where adaptability and delicate interaction are critical.
Inspired by biological systems, these artificial muscles mimic the natural contraction of human muscles in response to electrical impulses. They consist of liquid-filled pouches enclosed in layers of material, which contract when voltage is applied, allowing them to generate smooth, controlled motion. The unique waterproof design ensures functionality in various environments, including underwater, and the self-sealing structure provides added durability, preventing failure even if punctured.
Demonstrated in applications like a robotic gripper and a swimming robotic fish, the HALVE actuators showcase their potential in areas such as robotics, prosthetics, and wearables. The combination of low energy consumption, adaptability, and durability makes these artificial muscles a versatile solution for creating soft, efficient, and responsive robotic systems.
The work was featured in an ETH Zurich news article titled "Artificial muscles – lighter, safer, more robust".