Differentiable Swimmer Optimization
The computational design of soft underwater swimmers is challenging because of the high degrees of freedom in soft-body modeling. In this paper, we present a differentiable pipeline for co-designing a soft swimmer's geometry and controller. Our pipeline unlocks gradient-based algorithms for discovering novel swimmer designs more efficiently than traditional gradient-free solutions. We propose Wasserstein barycenters as a basis for the geometric design of soft underwater swimmers since it is differentiable and can naturally interpolate between bio-inspired base shapes via optimal transport. By combining this design space with differentiable simulation and control, we can efficiently optimize a soft underwater swimmer's performance with fewer simulations than baseline methods. We demonstrate the efficacy of our method on various design problems such as fast, stable, and energy-efficient swimming and demonstrate applicability to multi-objective design.
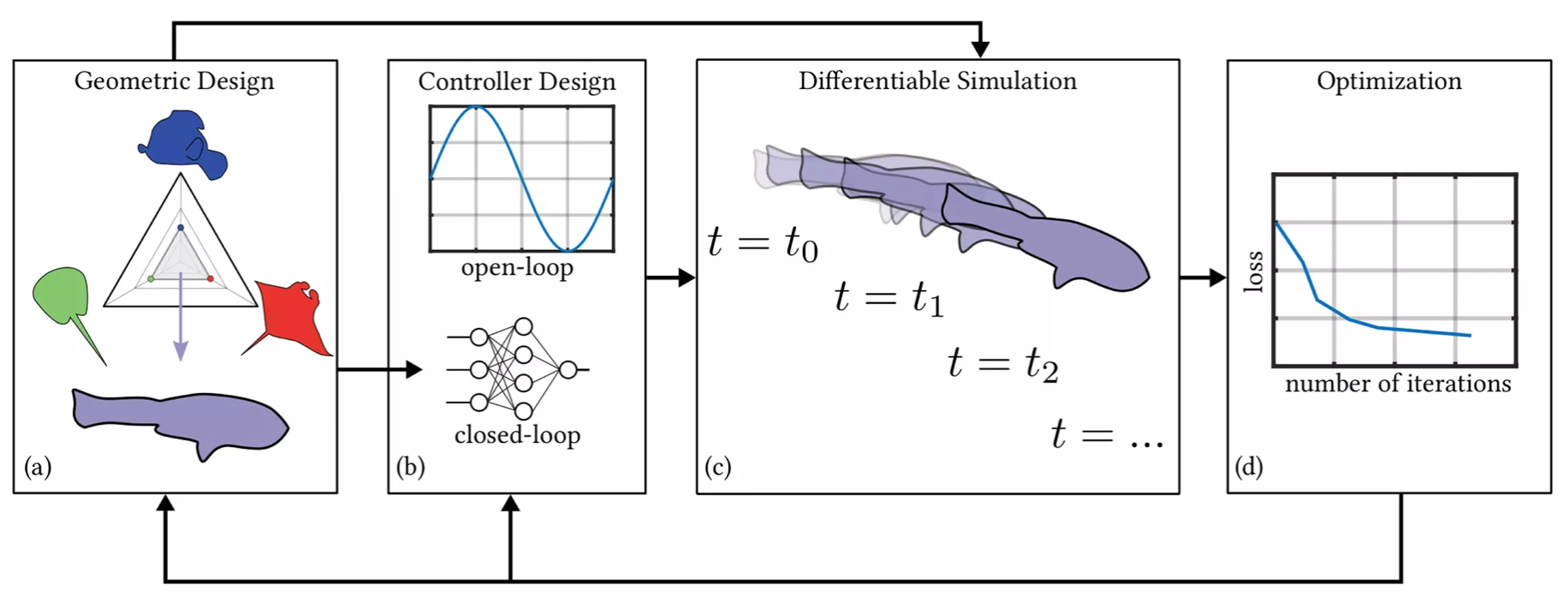
Figure 1. The overview of our differentiable pipeline for both forward and backward propagation.
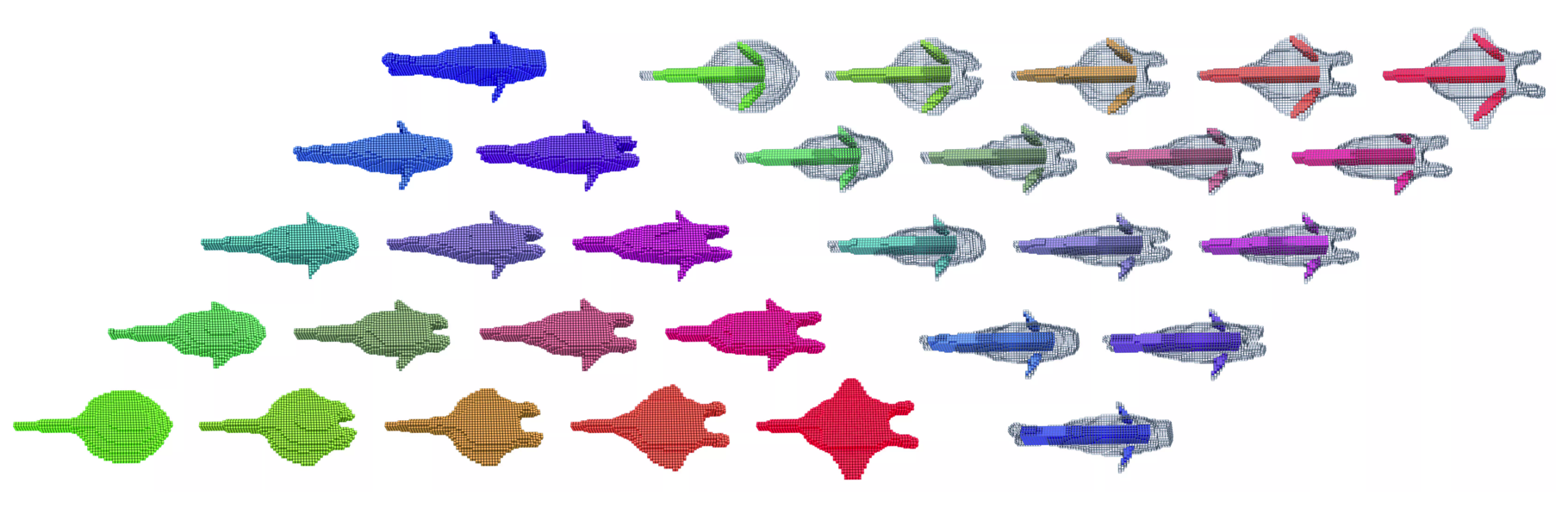
Figure 2. The illustration of the Wasserstein barycentric interpolation on the shape and the actuators.
Publication
DiffAqua: A Differentiable Computational Design Pipeline for Soft Underwater Swimmers with Shape Interpolation
Pingchuan Ma, Tao Du, John Z. Zhang, Kui Wu, Andrew Spielberg, Robert K. Katzschmann, and Wojciech Matusik
ACM Transactions on Graphics, Proceedings of ACM SIGGRAPH, 2021