Soft Robotic Arms
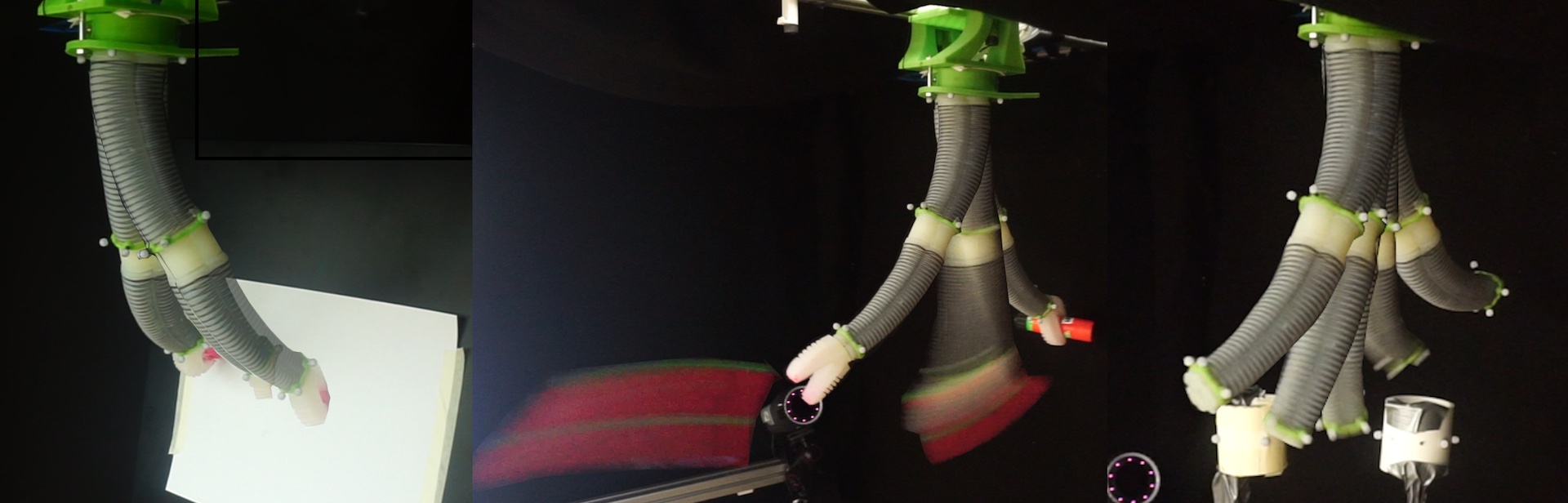
Dynamic control of soft robotic arms allows us to perform tasks quickly and efficiently. We introduce approaches to dynamic operational space control that take into account the dynamic parameters of continuum arms to operate smoothly in task space. Advanced control methods such as potential field avoidance was previously afforded only to rigid robots and are now adapted to soft robots. Using our approach, a soft manipulator can achieve a variety of tasks that were previously not possible: we evaluate the manipulator's performance in closed-loop controlled experiments such as pick-and-place, obstacle avoidance, throwing objects using an attached soft gripper, and deliberately applying forces to a surface by drawing with a grasped piece of chalk.
Publications on Soft Robotics Arms
- Dynamically Closed-Loop Controlled Soft Robotic Arm using a Reduced Order Finite Element Model with State Observer
- Dynamic Motion Control of Multi-Segment Soft Robots Using Piecewise Constant Curvature Matched with an Augmented Rigid Body Model
- Dynamic Control of Soft Continuum Manipulators
- SoPrA: Soft Continuum Robotic Arm with Proprioceptive Sensing
- Model-Based Disturbance Estimation for a Fiber-Reinforced Soft Manipulator using Orientation Sensing