Design and Fabrication
Design
Designing the structure of a soft robot with fully integrated actuation and sensing is challenging, especially when trying to reproducibly build soft robots. Existing designs do not allow for soft actuators with high power density that can easily overcome gravitational forceswhile providing adequate sensor resolution. Both characteristics require designs that use highly controlled deposition of functional materials over large volumes and at a fine resolution.
Fabrication
We advance casting and printing techniques for soft robots by investigating printing, multi-layer deposition and lithography methods that allow for structures with fine resolution and high power density.
Our research covers material science, mechanical engineering, tissue enginering, and computer science in order to develop design and manufacturing methods that create reproducibly strong soft robots with a high sensor density. One of our lab's long-term goals is to reliably grow functional artificial muscle tissue.
Related platform - Soft Robotic Fish
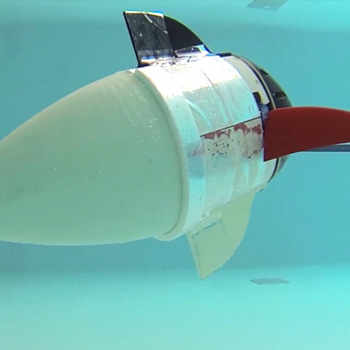
This work presents the design, fabrication, control, and oceanic testing of a soft robotic fish that can swim in three dimensions to continuously record the aquatic life it is following or engaging.