Fluid-Structure Interaction
Computational Co-Optimization of Swimmers using Simplified Hydrodynamics
The computational design of soft underwater swimmers is challenging because of the high degrees of freedom in soft-body modeling. In this paper, we present a differentiable pipeline for co-designing a soft swimmer's geometry and controller. Our pipeline unlocks gradient-based algorithms for discovering novel swimmer designs more efficiently than traditional gradient-free solutions. We propose Wasserstein barycenters as a basis for the geometric design of soft underwater swimmers since it is differentiable and can naturally interpolate between bio-inspired base shapes via optimal transport. By combining this design space with differentiable simulation and control, we can efficiently optimize a soft underwater swimmer's performance with fewer simulations than baseline methods. We demonstrate the efficacy of our method on various design problems such as fast, stable, and energy-efficient swimming and demonstrate applicability to multi-objective design.
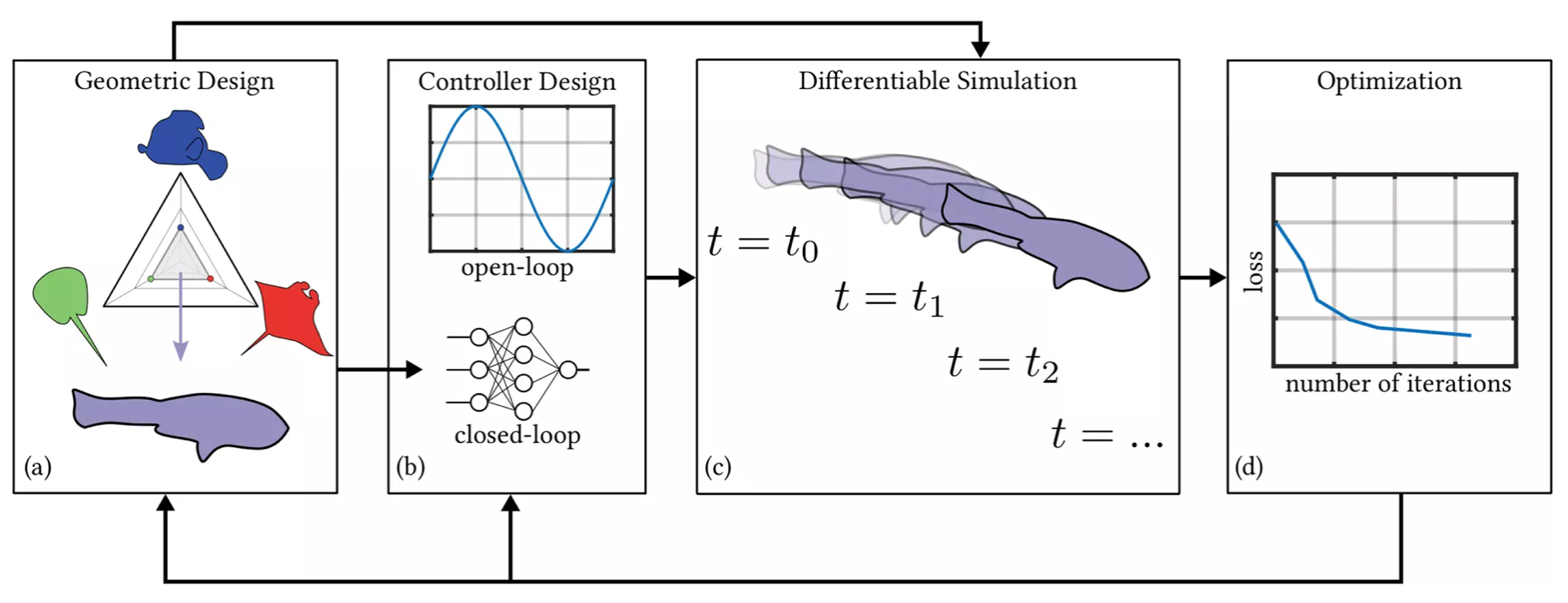
Figure 1. The overview of our differentiable pipeline for both forward and backward propagation.
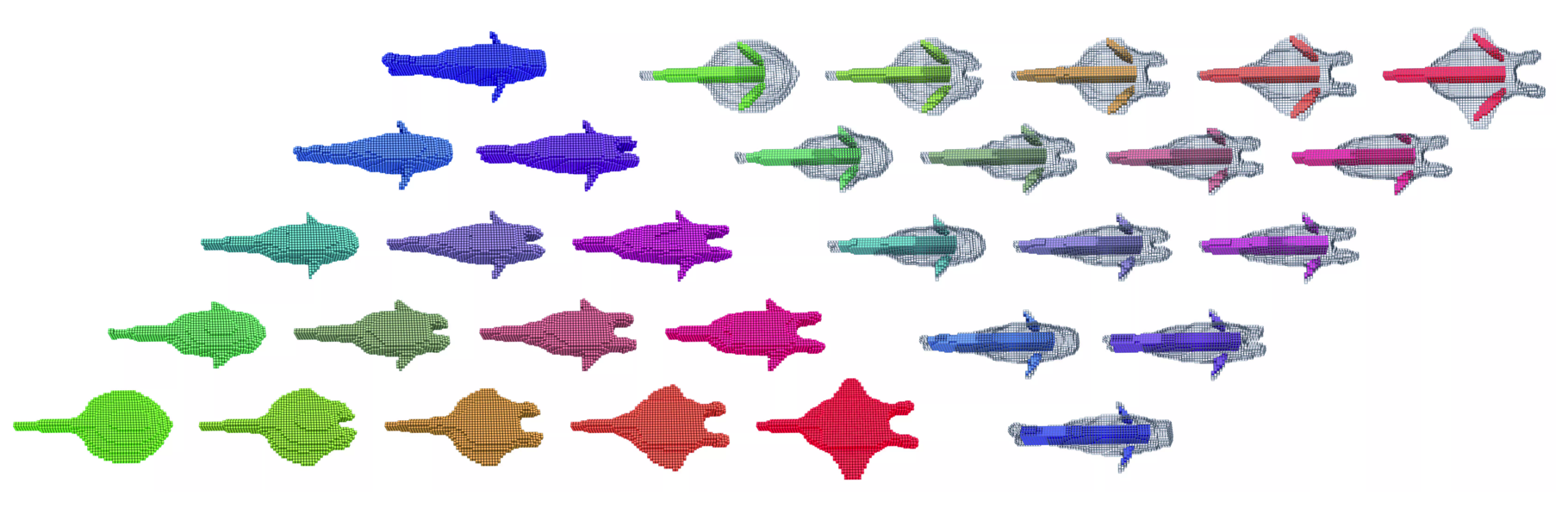
Figure 2. The illustration of the Wasserstein barycentric interpolation on the shape and the actuators.
Differentiable Modeling of Fluid-Structure Interaction with Fluid Surrogate
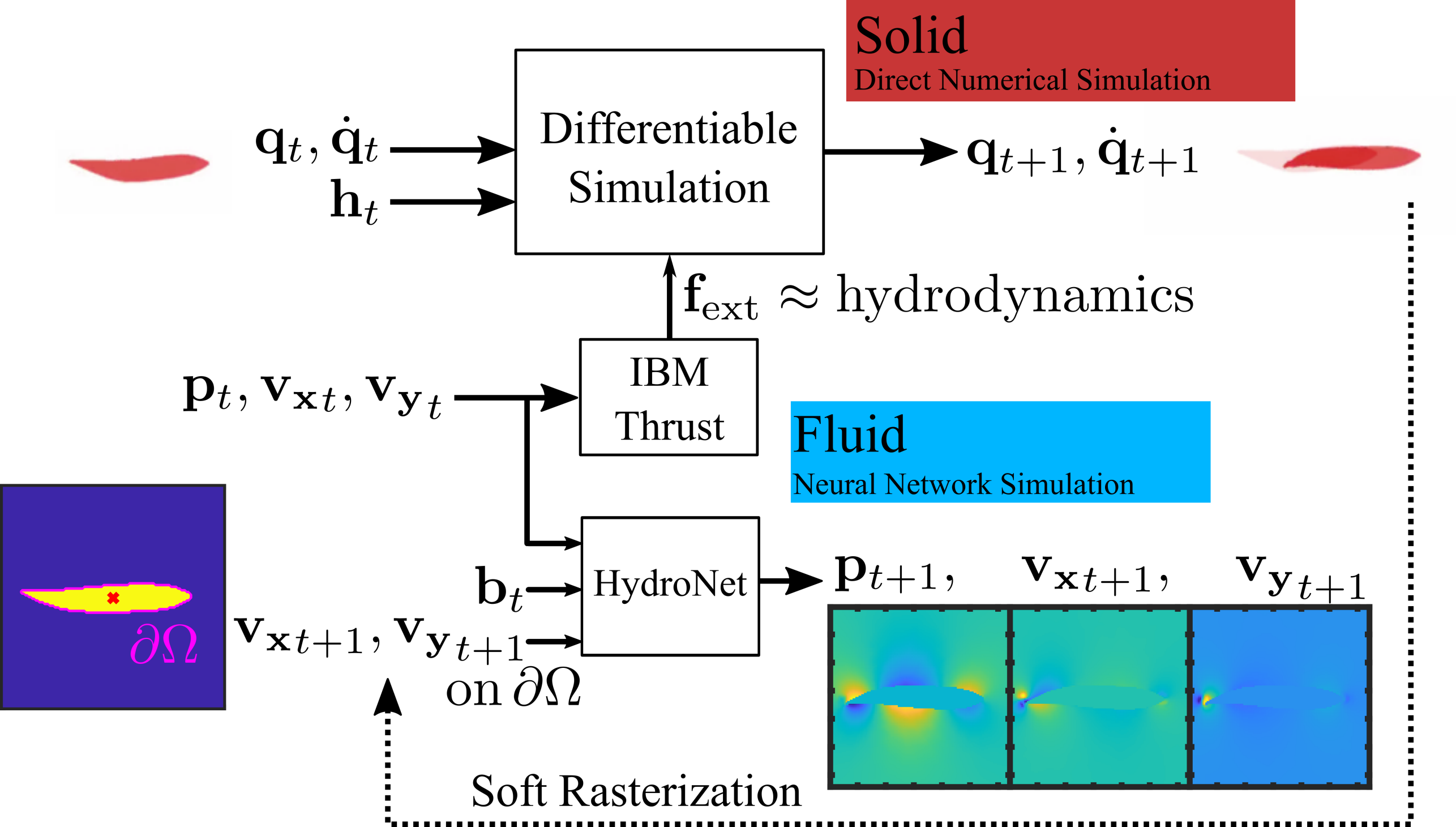
We are developing multiphysics simulation techniques, leveraging insights from both numerical simulation and Physics-Informed Neural Networks, with the goal of better modeling, designing and controlling soft robots. Our latest work on the topic, "Fast Aquatic Swimmer Optimization with Differentiable Projective Dynamics and Neural Network Hydrodynamic Models", combines differentiable Finite Element Method simulation of the swimmer's soft body with a neural network-based surrogate model of the fluid medium which is fully learned in a self-supervised manner. We obtain a powerful, sufficiently general and fast simulator that can be used for design tasks where previous computationally intensive and non-differentiable methods could not be effectively employed. We demonstrate the computational efficiency and differentiability of our hybrid approach by finding the optimal swimming frequency of a simulated 2D soft body swimmer through gradient-based optimization, but exciting future applications of the technique could involve full 3D shape optimization, real world robotic fabrication, and the training of neural network based controllers without expensive Reinforcement Learning.
Video available on Slideslive at: external page [Video]
Publications
DiffAqua: A Differentiable Computational Design Pipeline for Soft Underwater Swimmers with Shape Interpolation
Pingchuan Ma, Tao Du, John Z. Zhang, Kui Wu, Andrew Spielberg, Robert K. Katzschmann, and Wojciech Matusik
ACM Transactions on Graphics, Proceedings of ACM SIGGRAPH, 2021
external page [Paper] external page [Code]
Fast Aquatic Swimmer Optimization with Differentiable Projective Dynamics and Neural Network Hydrodynamic Models
Elvis Nava, John Z. Zhang, Mike Y. Michelis, Tao Du, Pingchuan Ma, Benjamin F. Grewe, Wojciech Matusik, Robert K. Katzschmann.
International Conference of Machine Learning (ICML), 2022