Multi-tap resistive sensing and FEM modeling enables shape and force estimation in soft robots
Published in IEEE Robotics and Automation Letters, this research presents a new method for accurate shape and force estimation in soft robots. By multi-tapping resistive sensors and integrating them with FEM modeling, the system estimates deformation with high precision. This method has potential applications in soft robotic manipulation for identifying the shape and material properties of grasped objects.
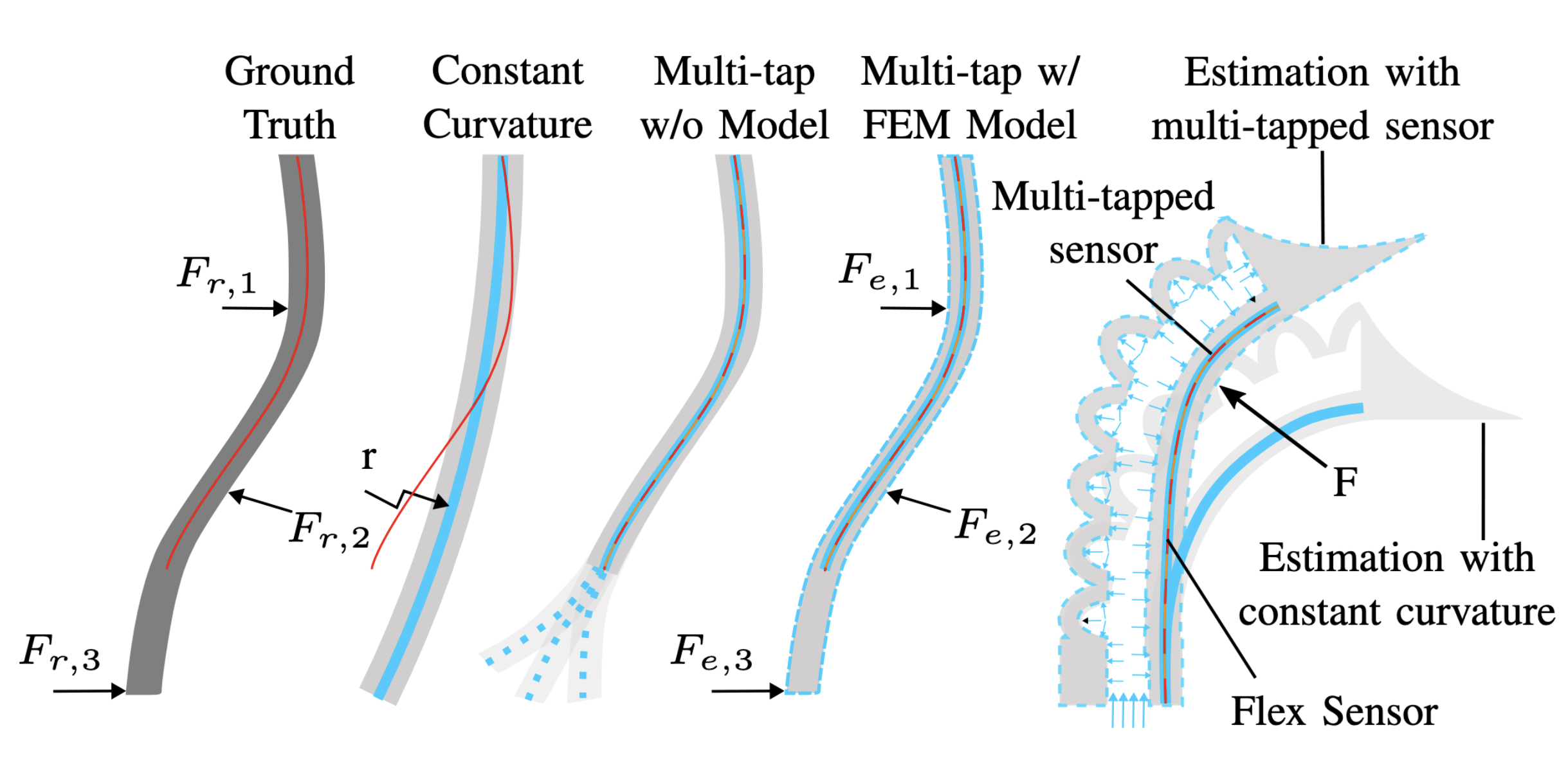
Soft robots require precise proprioception, which this research addresses through multi-tap resistive sensing and FEM modeling. By placing electrical connections along a resistive sensor embedded in a soft body, the system measures local deformations and estimates external force disturbances. With a 3% error in deformation estimation and 11% error in force disturbance, this method significantly enhances the sensing capabilities of soft robots under tight packaging constraints.
external page Link to the paper on Arxiv