Learning a dexterous policy for a biomimetic tendon-driven hand with rolling contact joints
Presented at the 2023 IEEE-RAS Humanoid Robots Conference, this paper demonstrates a biomimetic tendon-driven robotic hand capable of dexterous in-hand manipulation. Using reinforcement learning (RL) and a high-DoF design, the system successfully performs a complex task—rotating a sphere in-hand. This research marks a minor breakthrough in RL-based dexterous manipulation.
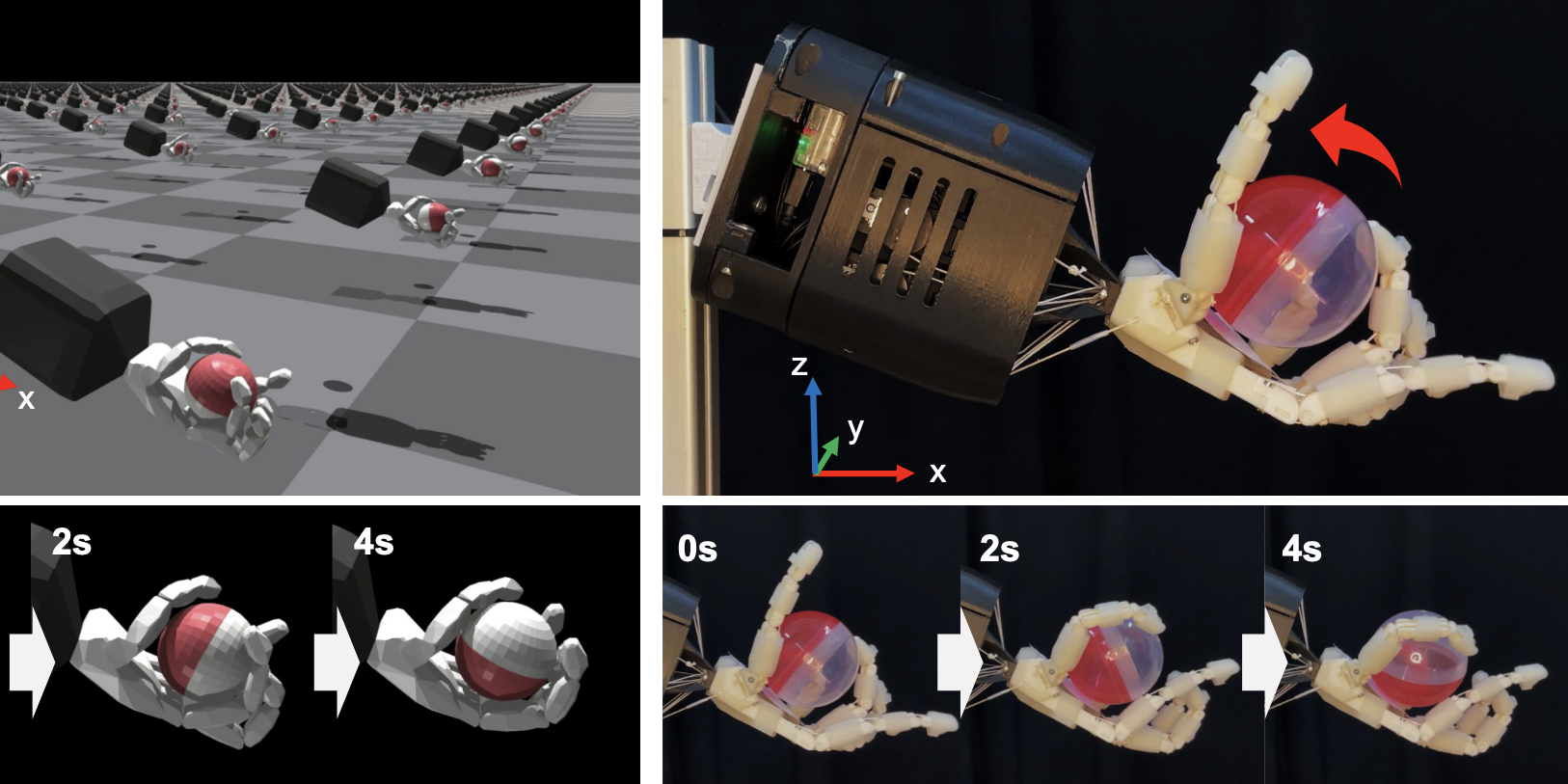
This paper introduces the Faive Hand, a tendon-driven robotic hand designed for biomimetic dexterity. The hand is modeled in a GPU-based simulation environment, where a reinforcement learning (RL) policy is trained for dexterous manipulation. The policy is transferred to a real robot hand, successfully achieving in-hand sphere rotation. This approach reduces the gap between RL simulations and real-world applications for robotic hands.
external page Link to the paper on Arxiv