Task-defined Pulley Design for Nonlinearly Coupled Tendon-driven Actuation
At RoboSoft 2024, we present our paper on a systematic methodology for designing pulleys that enable task-defined nonlinear coupling in tendon-driven actuators. The method achieves low tracking error in a tendon-driven finger, paving the way for efficient actuation in multi-degree-of-freedom robots. This work holds significant implications for advanced robotic hands, manipulators, and animatronics.
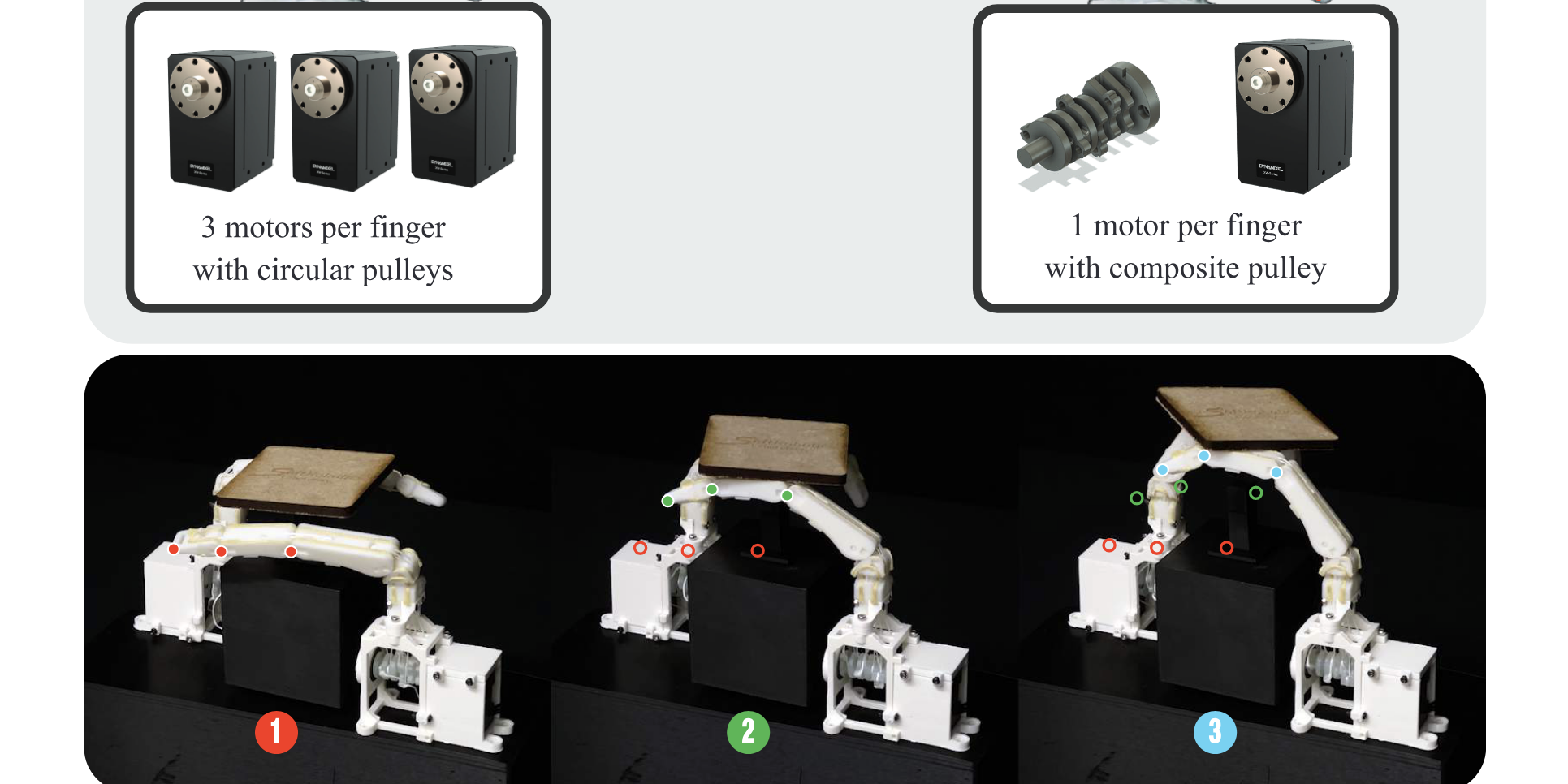
Nonlinear coupling of tendons in robotic systems reduces the number of required actuators, simplifying control while maintaining performance. This paper presents a method for designing pulleys with variable radii that allow task-specific nonlinear coupling. Simulations show a 2.19% error, and experiments on a robotic finger yield a 5.35% orientation tracking error. This method enables more efficient control in tendon-driven robotic systems.