The first proprioceptive bio-hybrid robot that can self-regulate its motion
Would you like to see the first proprioceptive bio-hybrid robot that can self-regulate its motion? Click this link to learn more!
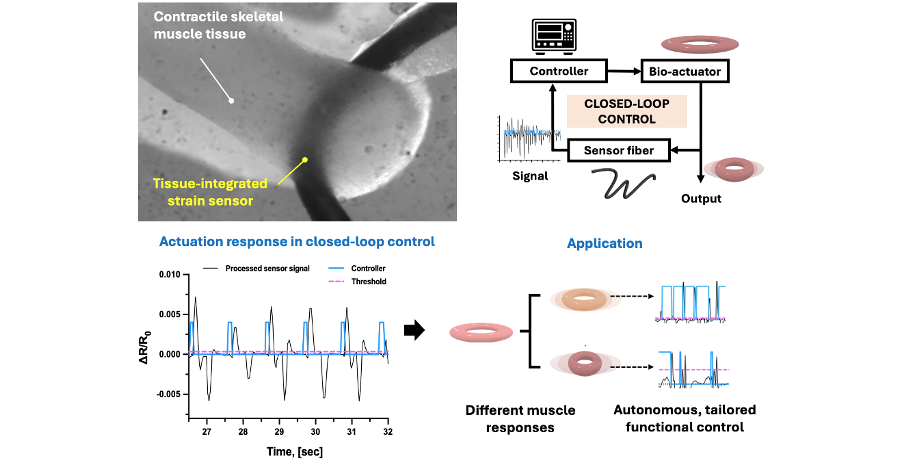
At the Soft Robotics Lab led by Professor Robert Katzschmann at ETH Zurich, Aiste Balciunaite, Dr. Antonia Georgopoulou, Pablo Paniagua, Dr. Miriam Filippi and coworkers engineered a closed-loop control system on skeletal muscle tissue-based bio-actuators, in which the state of the tissue contraction determines the pattern of the electrical stimuli. By collaborating with the groups led by Dr. Frank Clemens at EMPA and Prof. Shoji Takeuchi and Dr. Minghao Nie at the University of Tokyo, the ETH group embedded sensors inside the muscle and achieved autonomous regulation of the muscle’s actuation.
In addition to inspiring intelligent technologies for tissue engineering, this work drives the paradigm shift between bio-actuators and intelligent bio-hybrid robots, and it is now available on Wiley Advanced Intelligent Systems.
Read the Full Publication
To explore the complete findings and implications of this research, read the full article published in Wiley Advanced Intelligent Systems:
external page https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202400413
Stay tuned for more updates as our team continues to push the boundaries of bio-hybrid robotics technology and their applications.