Somatosensitive Soft Robotic Fingers
Soft Robotic Fingers with Embedded Ionogel Sensors and Discrete Actuation Modes for Somatosensitive Manipulation
Soft robotic grippers enable gentle, adaptive, and bioinspired manipulation that is simply not possible using traditional rigid robots. However, it has remained challenging to create multi-degree-of-freedom soft actuators with appropriate sensory capabilities for soft manipulators requiring greater dexterity and closed-loop control.
In this work, we use embedded 3D printing to produce soft robotic fingers with discrete actuation modes and integrated ionogel soft sensors that provide proprioceptive and tactile sensing corresponding to each degree of freedom. With new readout electronics that streamline the measurement of sensor resistance, we evaluate the fingers’ sensory feedback through free and blocked displacement experiments. We integrate three of our sensorized fingers together to create a soft manipulator with different grasping poses.
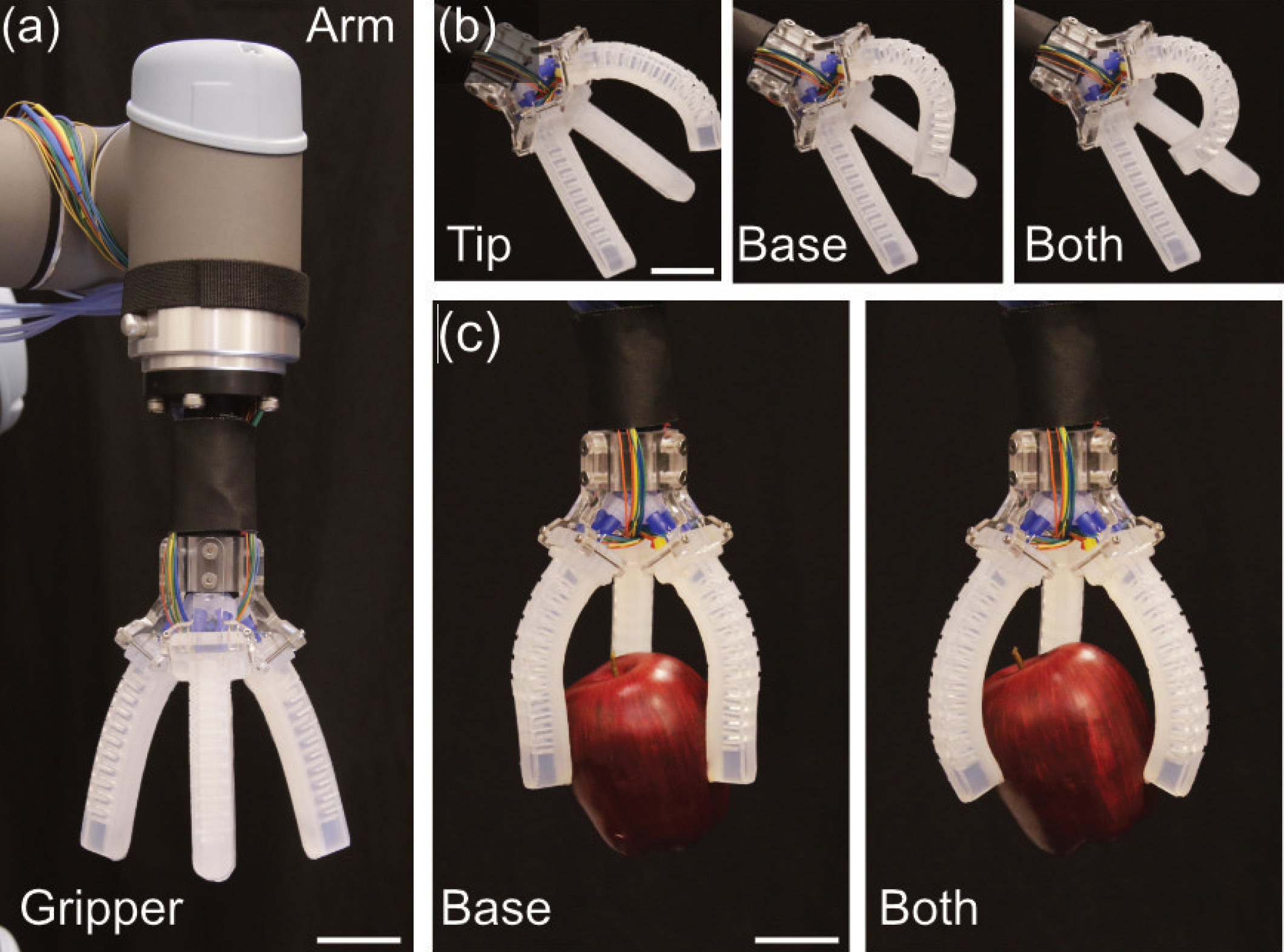
Finally, we showcase the importance of the fingers’ discrete actuation modes and integrated sensors via a closed-loop grasping study. Our methods demonstrate an enabling manufacturing platform that can be adapted to create other soft multi-DOF manipulators requiring somatosensory feedback for a variety of closed-loop and machine learning-based control algorithms.