Soft Robotic Hands
Soft biomimetic grippers enable gentle, adaptive, and bioinspired manipulation that is simply not possible using traditional rigid robots. However, it has remained challenging to create multi-degree-of-freedom soft actuators with appropriate sensory capabilities for soft manipulators requiring greater dexterity and closed-loop control. We use casting, printable hydraulics, or embedded 3D printing techniques to produce soft robotic fingers with discrete actuation modes and integrated soft sensors that provide proprioceptive and tactile sensing.
Projects
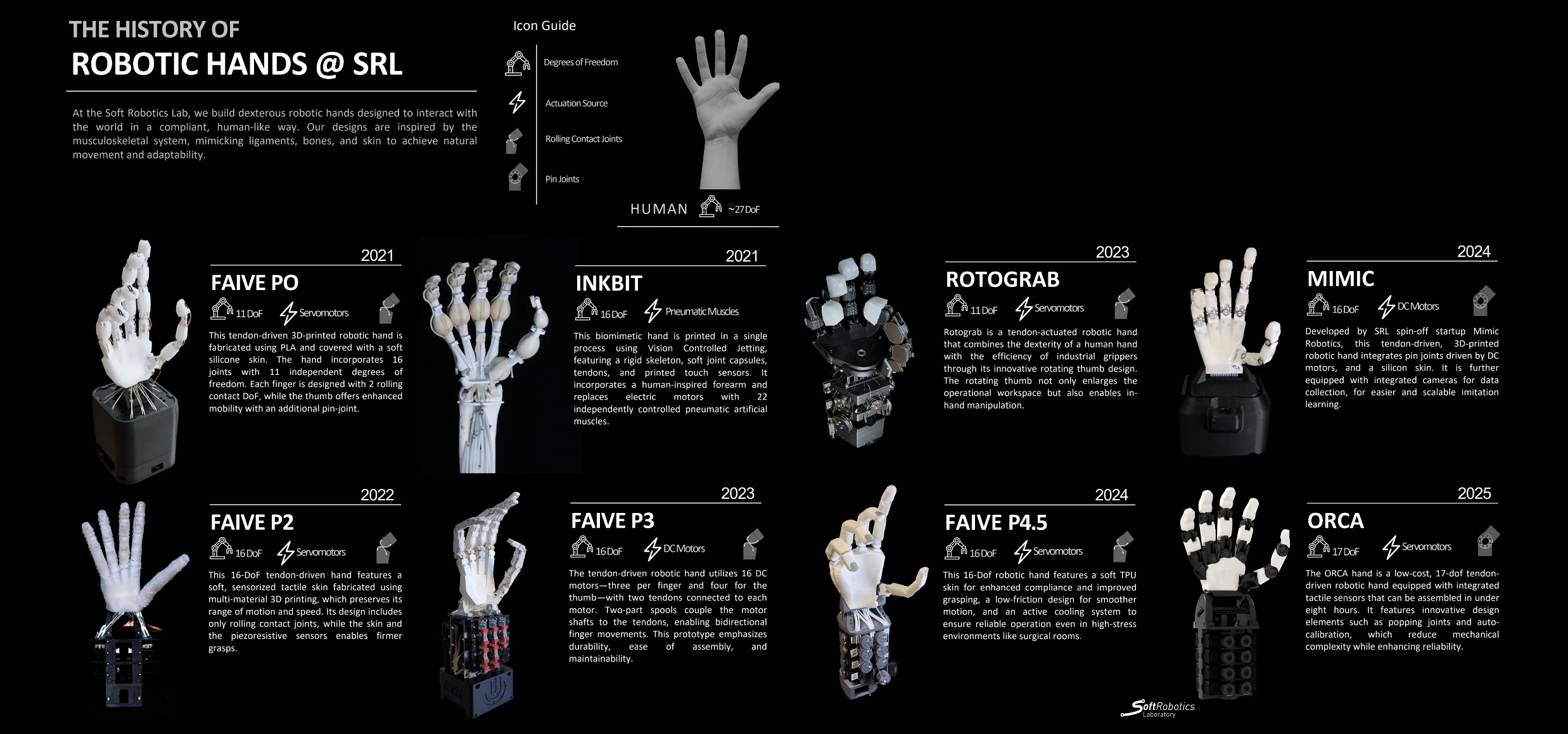
- ORCA Hand
- Biomimetic Tendon-Driven Hand
- Somatosensitive Soft Robotic Fingers
- Proprioceptive Soft Robotic Hand
- Printable Hydraulics for Soft Grippers
- Task-defined Pulley Design for Nonlinearly Coupled Tendon-driven Actuation
- Multi-tap Resistive Sensing and FEM Modeling enables Shape and Force Estimation in Soft Robots
- Getting the Ball Rolling: Learning a Dexterous Policy for a Biomimetic Tendon-Driven Hand with Rolling Contact Joints
Publications
Buchner, T.J.K., Rogler, S., Weirich, S. et al. Vision-controlled jetting for composite systems and robots. Nature 623, 522–530 (2023). external page Read Paper
T. Buchner, S. Weirich, A. M. Kübler, W. Matusik and R. K. Katzschmann, "Replicating Human Anatomy with Vision Controlled Jetting – A Pneumatic Musculoskeletal Hand and Forearm," 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft), San Diego, CA, USA, 2024. external page Read Paper
Y. Toshimitsu et al., "Getting the Ball Rolling: Learning a Dexterous Policy for a Biomimetic Tendon-Driven Hand with Rolling Contact Joints," 2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids), Austin, TX, USA, 2023. external page Read Paper
W. Zhang, B. G. Cangan, T. Buchner, A. M. Kübler, R. Asmus and R. K. Katzschmann, "Task-defined Pulley Design for Nonlinearly Coupled Tendon-driven Actuation," 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft), San Diego, CA, USA, 2024. external page Read Paper
A. Bersier et al., "Rotograb: Combining Biomimetic Hands with Industrial Grippers using a Rotating Thumb," 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, United Arab Emirates, 2024. external page Read Paper
J. Egli, B. Forrai, T. Buchner, J. Su, X. Chen and R. K. Katzschmann, "Sensorized Soft Skin for Dexterous Robotic Hands," 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024. external page Read Paper
R. Truby, R. Katzschmann, J. Lewis, D. Rus, “Soft Robotic Fingers with Embedded Ionogel Sensors and Discrete Actuation Modes for Somatosensitive Manipulation.” IEEE RoboSoft, Apr 2019. external page Read Paper
B. Homberg*, R. Katzschmann*, M. Dogar, and D. Rus, “Haptic Identification of Objects using a Modular Soft Robotic Gripper,” IROS, Hamburg, Sept. 2015. external page Read Paper
B. Homberg*, R. Katzschmann*, M. Dogar, D. Rus, “Robust Proprioceptive Grasping with a Soft Robot Hand.” Autonomous Robots, Apr 2018. external page Read Paper
R. MacCurdy, R. Katzschmann, Y. Kim, and D. Rus, “Printable hydraulics: A method for fabricating robots by 3D co-printing solids and liquids.” ICRA, Stockholm, 2016. external page Read Paper