Multiphysics
Exploring various methods to model the complex multiphysical world around soft robots.
Biohybrid Swimmer
At the Soft Robotics Lab, we are pioneering a new generation of aquatic robots inspired by nature’s swimmers. Our biohybrid swimmers merge biological components with robotic designs, creating robots capable of natural, fluid movement in aquatic environments. This research opens new possibilities in underwater exploration, environmental monitoring, and bio-inspired engineering, advancing both the field of soft robotics and the understanding of biomechanical principles.
We apply COMSOL simulations to biohybrid swimmer constructs to investigate the forward thrust generated by the robot. We simulate fully-coupled fluid-structure interaction in a 2D slice of the robot, assuming the robot swims in a planar motion.

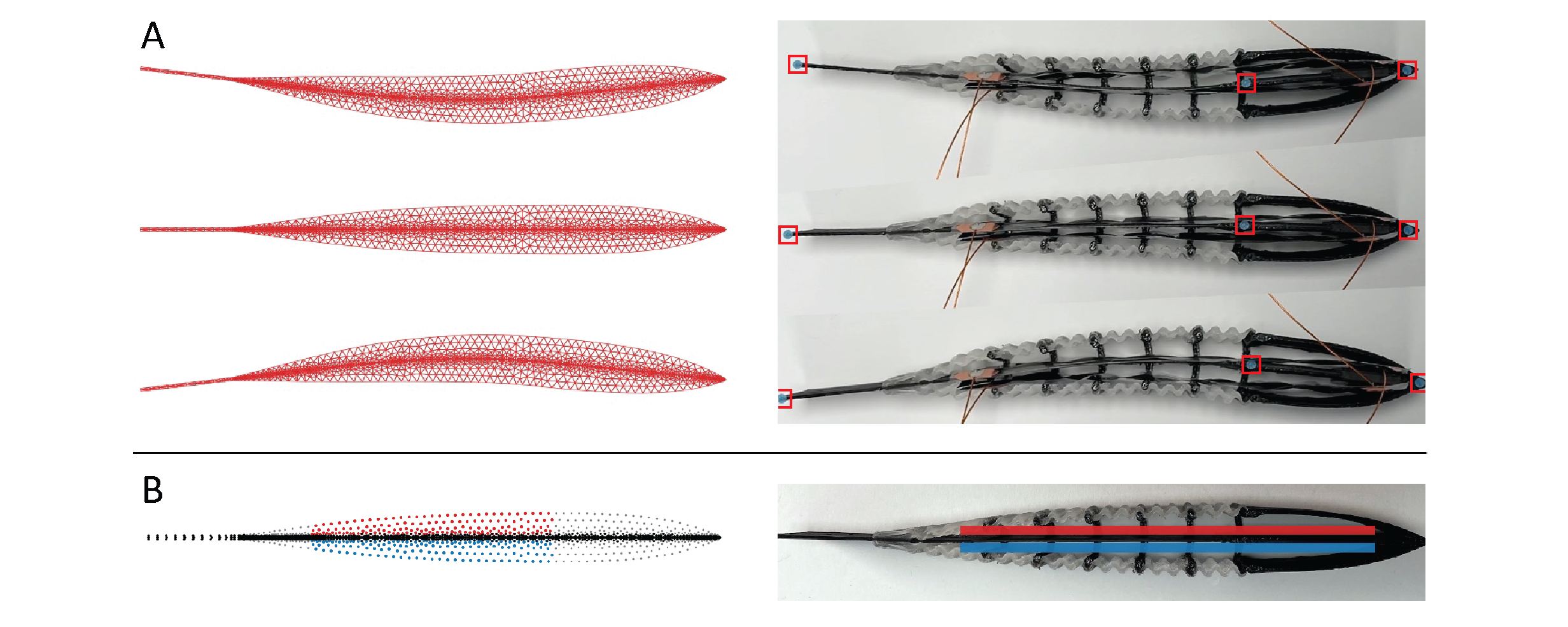
Planar HASEL Swimmer
We model the actuation behavior of a Peano-HASEL swimmer using a soft body and muscle actuation to match real-world behavior. We perform several experiments with the fabricated swimmer by varying the voltage and actuation frequency of the swimmer's antagonistic muscles. We show how the voltage and frequency vary the locomotion speed of the swimmer while moving in liquid oil and observe a clear optimum in forward swimming speed.
The differentiable simulation model we propose has various downstream applications, such as control and shape optimization of the swimmer; optimization results can be directly mapped back to the real robot through our sim-to-real matching.