Model-based disturbance estimation for a fiber-reinforced soft manipulator using orientation sensing
Presented at the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), this paper introduces a model-based method for estimating disturbances in fiber-reinforced soft manipulators. By utilizing finite element method (FEM) models and orientation sensors, the research provides accurate force estimation to improve interaction control. The system reduces force estimation errors to 1.2%, a significant step towards deploying soft robots in human-centered environments.
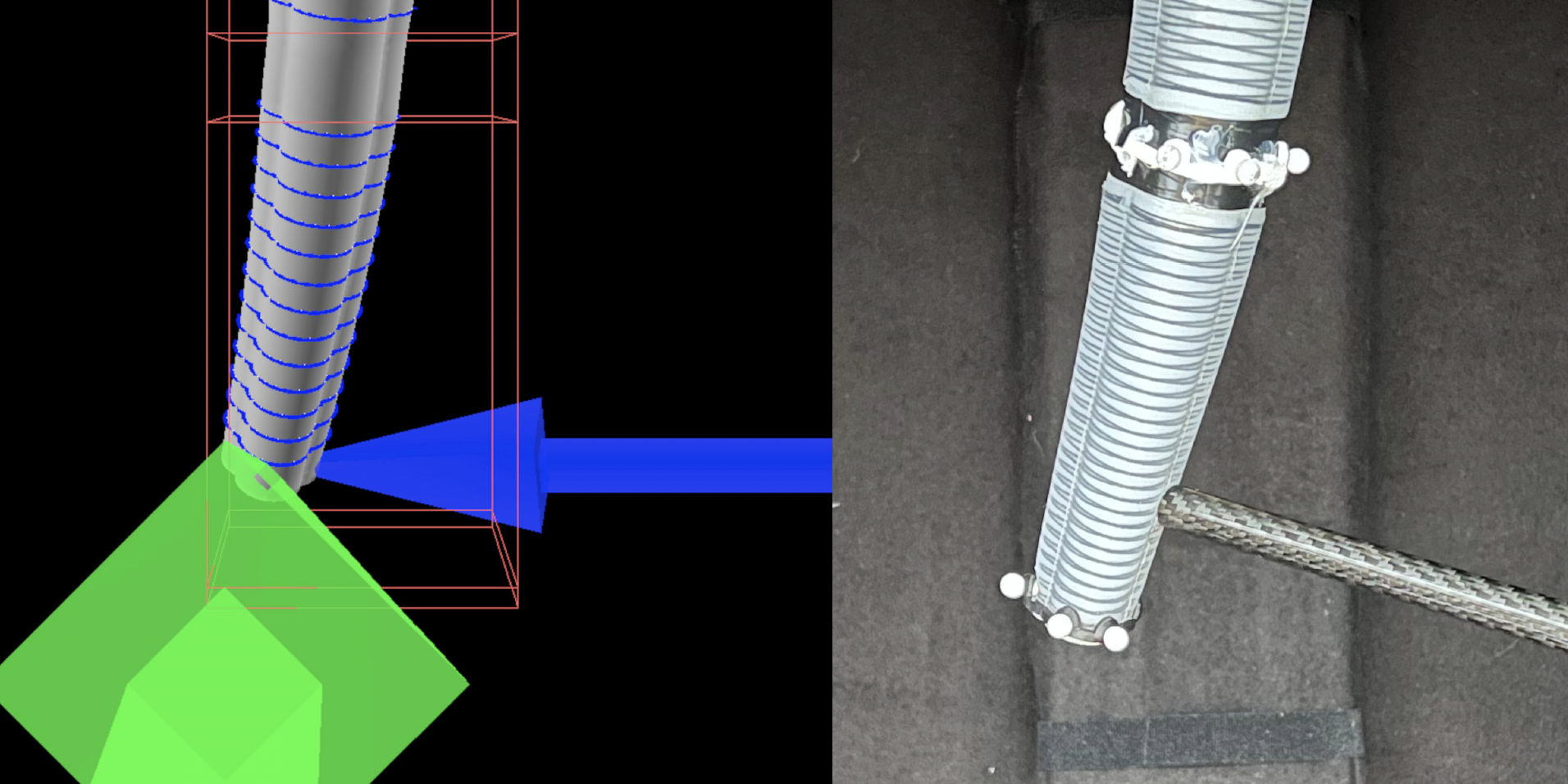
Soft robots need to estimate their state and external interactions through sensors to perform force control in real-world tasks. Using the FEM-based SOFA framework, this research builds a detailed model of a soft continuum robot with pressurized chambers. It proposes a method to estimate external forces using sensor-based orientation data. Experimental results demonstrate a 1.2% error rate in force estimation, showcasing the system’s precision.