Electrostatic Soft Robotic Fish
We provide an efficient and straightforward pipeline for designing and fabricating soft robotic swimmers equipped with electrostatic actuation. We streamline the process to allow for rapid additive manufacturing, and show how a differentiable simulation can be used to match a simplified model to the real deformation of a robotic swimmer. We perform several experiments with the fabricated swimmer by varying the voltage and actuation frequency of the swimmer's antagonistic muscles. We show how the voltage and frequency vary the locomotion speed of the swimmer while moving in liquid oil and observe a clear optimum in forward swimming speed.
The differentiable simulation model we propose has various downstream applications, such as control and shape optimization of the swimmer; optimization results can be directly mapped back to the real robot through our sim-to-real matching.
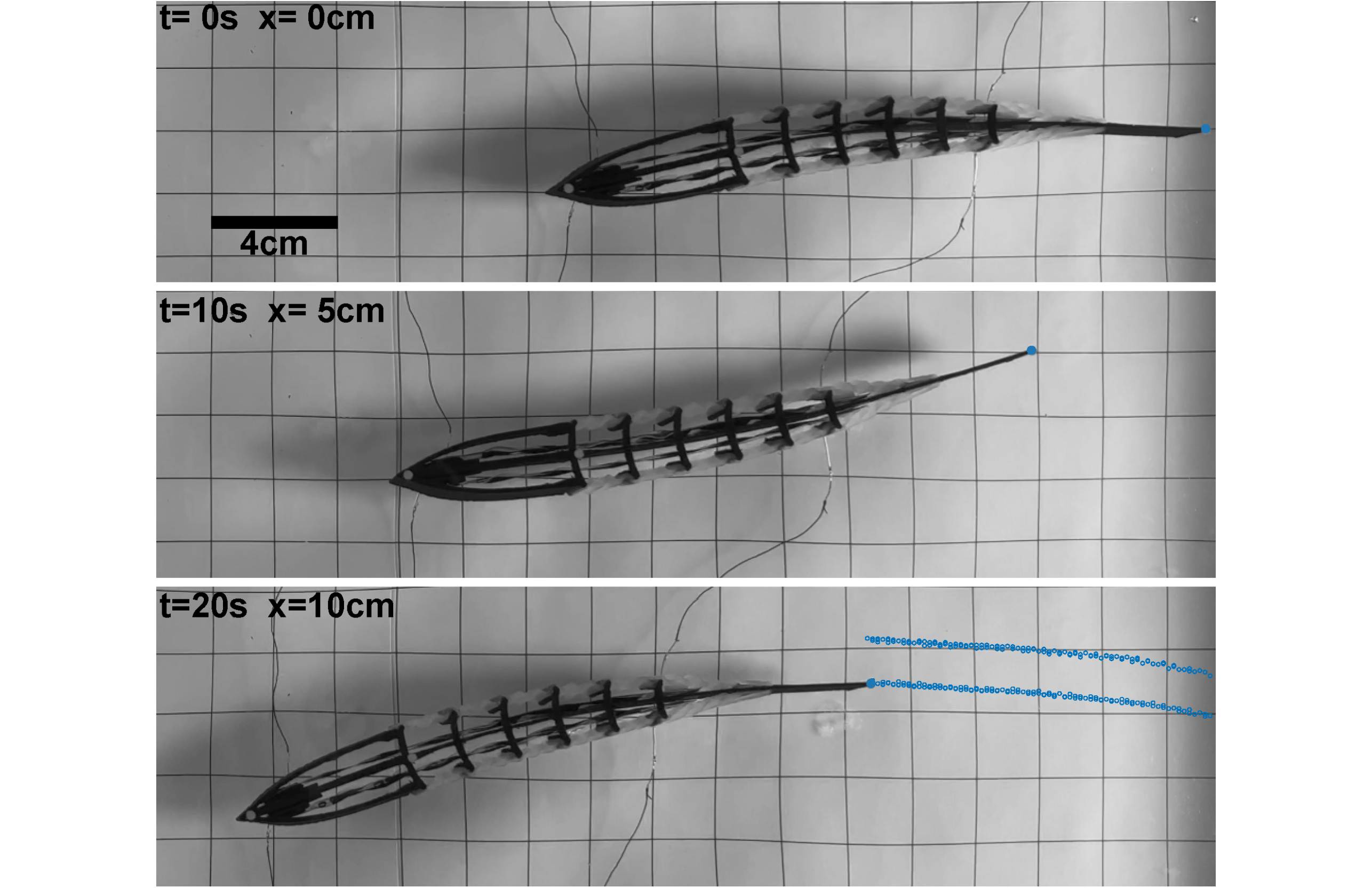
The previous figure depicts a time series of still images of the 3D printed fish swimming in oil at 0 seconds, 10 seconds, and 20 seconds. The swimmer traversed 10 centimeters within the 20 second experiment. The current position of the tip of the tail fin is marked with a blue label. In the bottom image, the tail fin's maximal positions are visualized with blue lines.
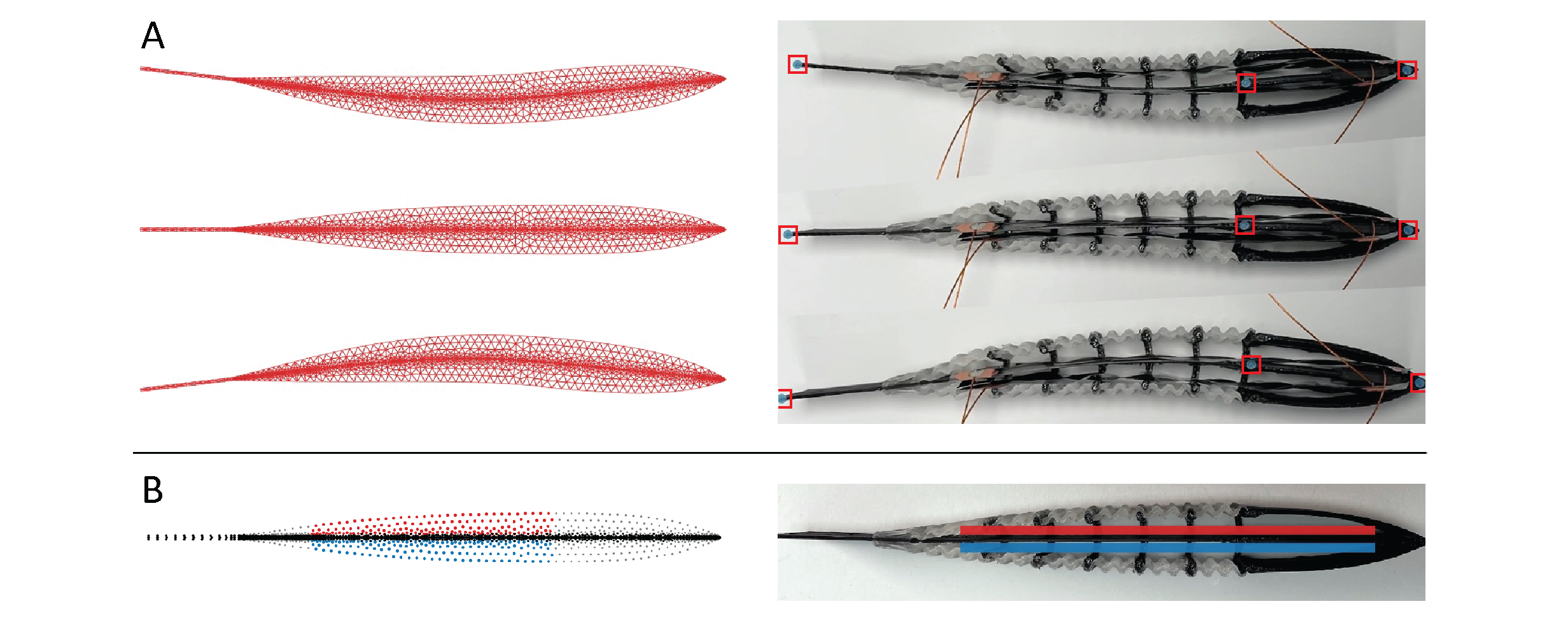
In the image above we display the modeling of a soft swimmer equipped with HASEL actuators using simplified model: external thin-wall and middle spine structures are simplified. (A) shows a qualitative matching between simulated and real swimmers in bending angles, where the blue tracker markers are highlighted with red boxes, and (B) shows the location of the actuated muscles in simulation (left) and reality (right). In simulation we depict the vertices, which are colored according to which type of element they belong to: red is upper muscle, blue is lower muscle, black is spine elements, and grey is soft material in the swimmer body
Publication
Planar Modeling and Sim-to-Real of a Tethered Multimaterial Soft Swimmer Driven by Peano-HASELs
Stephan-Daniel Gravert, Mike Y Michelis, Simon Rogler, Dario Tscholl, Thomas Buchner, Robert K. Katzschmann
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022