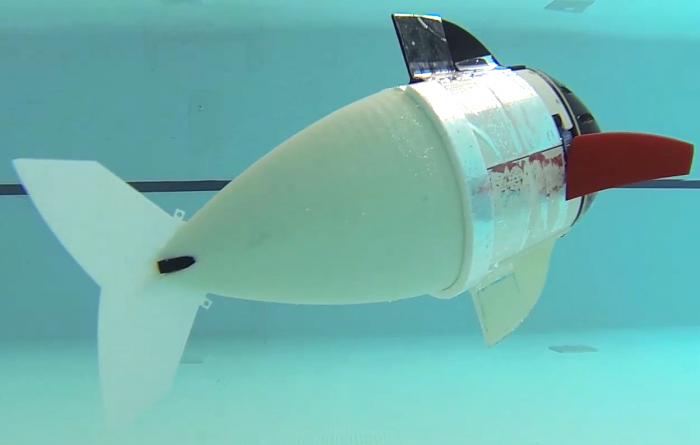
Hydraulic Soft Robotic Fish
A soft fish tail replaces a complex multi-link rigid fish body for biomimetic locomotion. This work presents a soft-bodied robotic fish that is hydraulically actuated and capable of sustained swimming in three dimensions. A new closed-circuit drive system that uses water as a transmission fluid is used to actuate the soft body. Circulation of water through internal body channels provides control over the fish’s caudal fin propulsion and yaw motion. A new fabrication technique for the soft body is described, which allows for arbitrary internal fluidic channels, enabling a wide-range of continuous body deformations. Furthermore, dynamic diving capabilities are introduced through pectoral fins as dive planes. These innovations enable prolonged fish-like locomotion in three dimensions.
Publications
R. Katzschmann, A. Marchese, D. Rus. “Hydraulic Autonomous Soft Robotic Fish for 3D Swimming.“
ISER, Marrakech, Morocco, June 2014. external page Read Paper