Remote Control
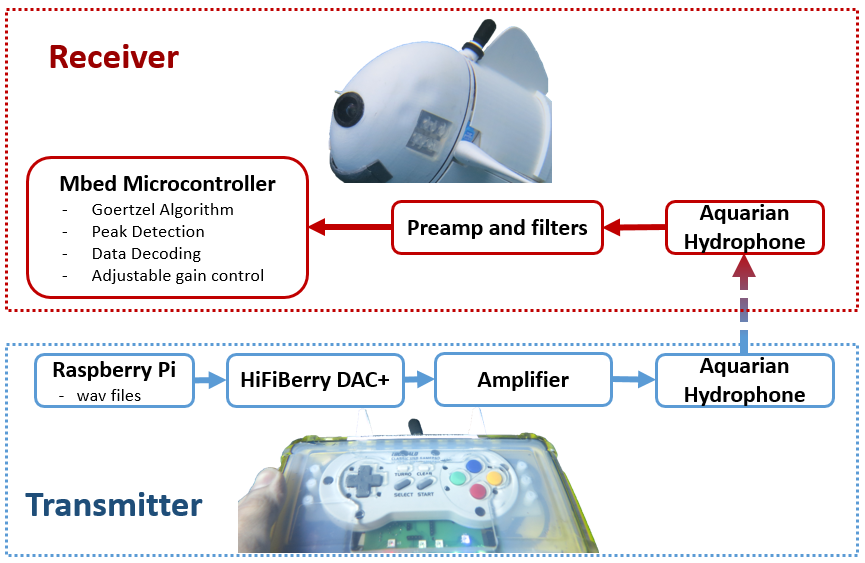
An end-to-end compact acoustic communication system designed for easy integration into remotely controlled underwater operations. The system supports up to 2048 commands that are encoded as 16 bit words. We present the design, hardware, and supporting algorithms for this system. A pulse-based FSK modulation scheme is presented, along with a method of demodulation requiring minimal processing power that leverages the Goertzel algorithm and dynamic peak detection.
We packaged the system together with an intuitive user interface for remotely controlling an autonomous underwater vehicle. We evaluated this system in the pool and in the open ocean. We present the communication data collected during experiments using the system to control an underwater robot.
Publications
J. Delpreto, R. Katzschmann, R. Maccurdy, and D. Rus, “A Compact Acoustic Communication Module for Remote Control Underwater.” Invited: ACM WUWNET, Washington D.C., USA, Oct. 2015. external page Read paper