Printable Hydraulics for Soft Grippers
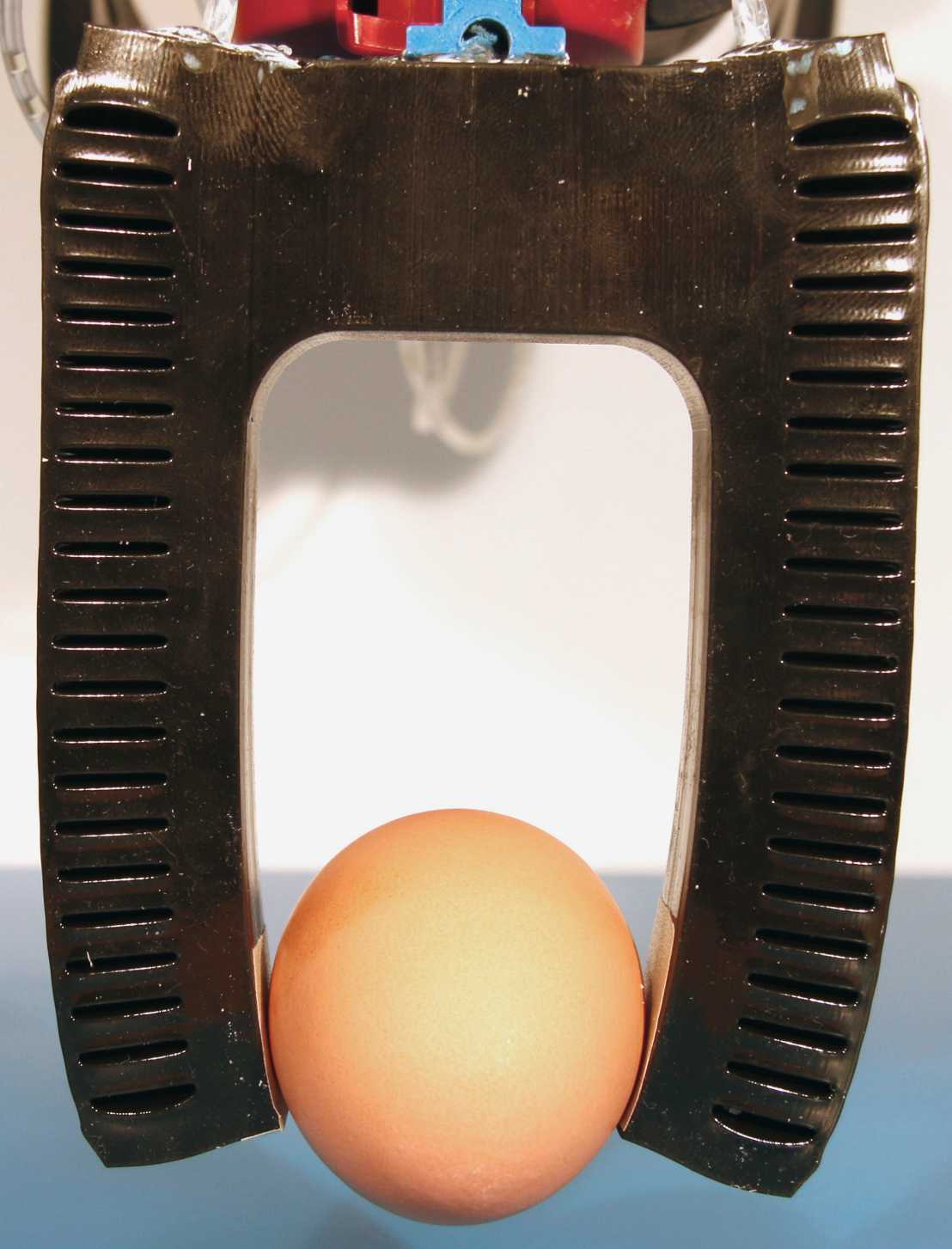
This work introduces a novel technique for fabricating functional robots using 3D printers. Simultaneously depositing photopolymers and a non-curing liquid allows complex, pre-filled fluidic channels to be fabricated. This new printing capability enables complex hydraulically actuated robots and robotic components to be automatically built, with no assembly required. The technique is showcased by printing linear bellows actuators, gear pumps, soft grippers and a hexapod robot, using a commercially-available 3D printer. We detail the steps required to modify the printer and describe the design constraints imposed by this new fabrication approach.
Publications
R. MacCurdy, R. Katzschmann, Y. Kim, and D. Rus, “Printable hydraulics: A method for fabricating robots by 3D co-printing solids and liquids.” ICRA, Stockholm, 2016. external page Read Paper
News Articles
(July 2016)
“First-ever 3-D printed robots made of both solids and liquids“ featured in CBS News, Wired, BBC News, The Verge, Washington Post, Popular Science, ZDNet, Quartz, PC Mag, CNET, Digital Trends, Daily Mail, Engadget, Fast Company, Mashable, Boston Magazine, Vice, Gizmodo, ABC News, Gizmag, Yahoo Finance, etc.