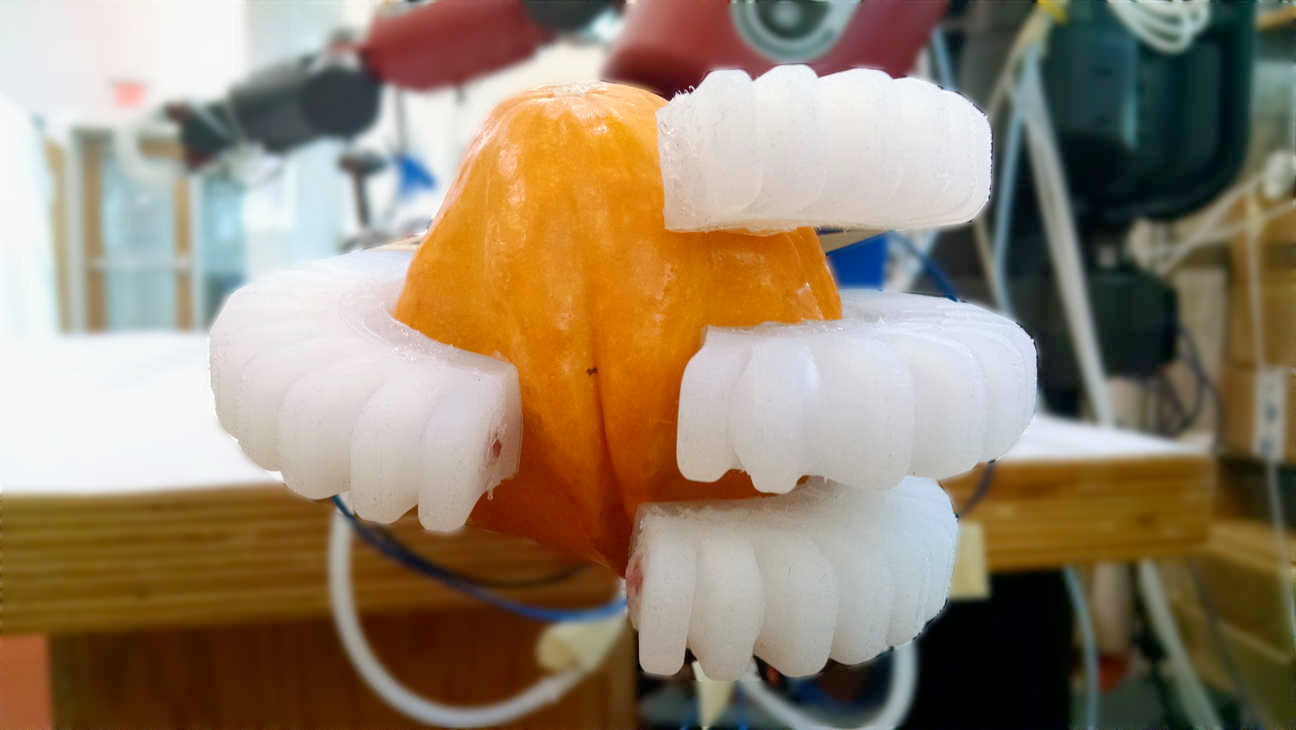
Proprioceptive Soft Robotic Hand
We developed a soft hand that is capable of robustly grasping and identifying objects based on internal state measurements along with a system that autonomously performs grasps. The highly compliant soft hand allows for intrinsic robustness to grasping uncertainties. The addition of internal sensing allows the configuration of the hand and object to be detected. The finger module includes resistive force sensors on the fingertips for contact detection and resistive bend sensors for measuring the curvature profile of the finger. The curvature sensors can be used to estimate the contact geometry. This capability allows to distinguish between a set of grasped objects. With one data point from each finger, the object can be identified by grasping it. A clustering algorithm finds the correspondence for each grasped object.
We tested this for both enveloping grasps and pinch grasps. A closed loop system uses a camera to detect approximate object locations. Compliance in the soft hand handles that uncertainty in addition to geometric uncertainty in the shape of the object.
Publications
B. Homberg*, R. Katzschmann*, M. Dogar, and D. Rus, “Haptic Identification of Objects using a Modular Soft Robotic Gripper,” IROS, Hamburg, Sept. 2015. external page Read Paper
B. Homberg*, R. Katzschmann*, M. Dogar, D. Rus, “Robust Proprioceptive Grasping with a Soft Robot Hand.” Autonomous Robots, Apr 2018. external page Read Paper
News Articles
(Sept. 2015)
“Soft robotic gripper can pick up and identify wide array of objects” featured in BBC, Scientific American, CNBC, VICE, Popular Science, Boston Globe, Bloomberg Radio, Washington Post, NBC News, Quartz, Christian Science Monitor, Gizmodo, Slashgear, BostInno, etc.