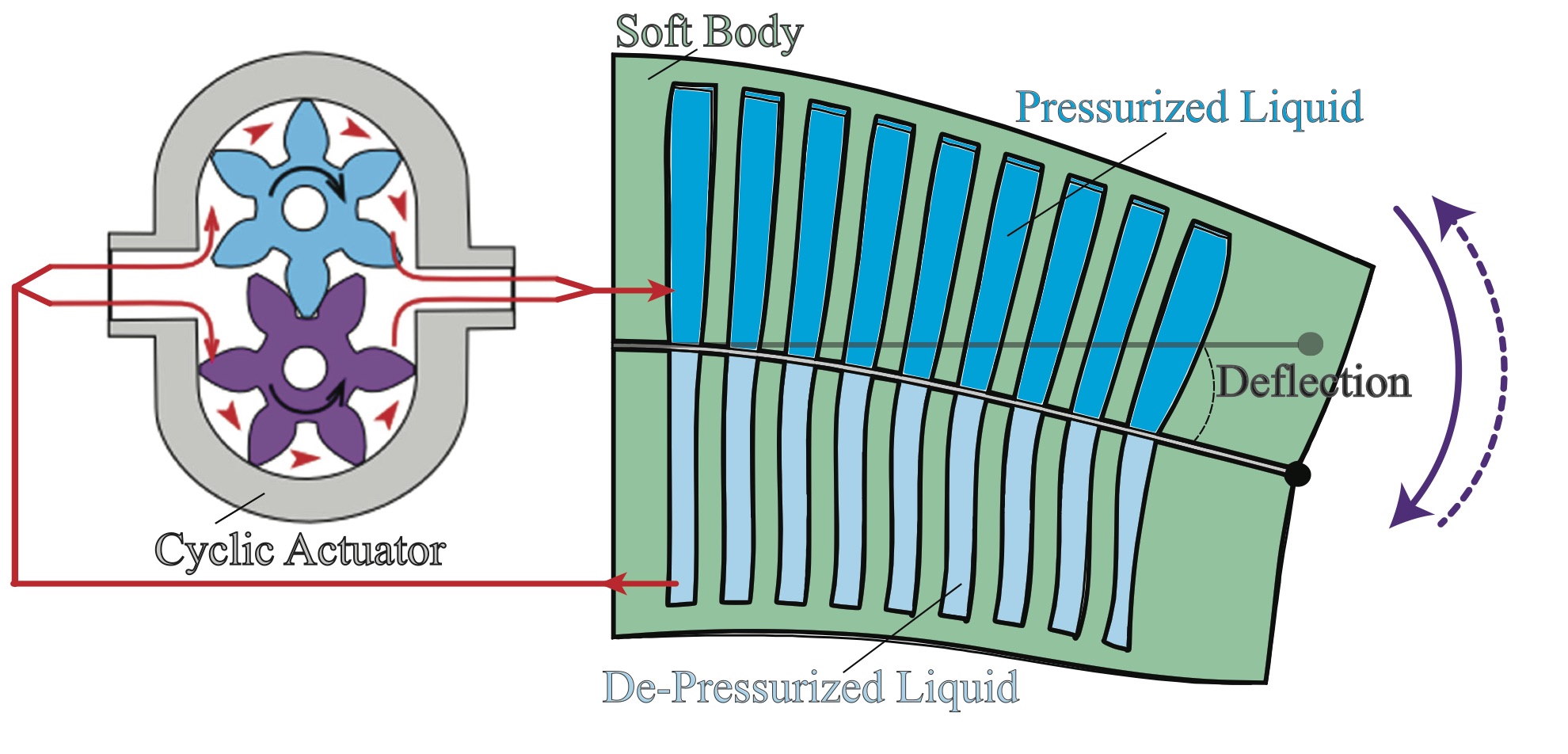
Cyclic Actuation
Various pump mechanisms are presented for soft undulating actuation in water. Undulating structures are one of the most diverse and successful forms of locomotion in nature, both on ground and in water. This work presents a comparative study for actuation by undulation in water.
We focus on actuating a 1DOF systems with several mechanisms. A hydraulic pump attached to a soft body allows for water movement between two inner cavities, ultimately leading to a flexing actuation in a side-to-side manner. The effectiveness of six different, self-contained designs based on centrifugal pump, flexible impeller pump, external gear pump and rotating valves are compared. These hydraulic actuation systems combined with soft test bodies were then measured at a lower and higher oscillation frequency. The deflection characteristics of the soft body, the acoustic noise of the pump and the overall efficiency of the system are recorded. A brushless, centrifugal pump combined with a novel rotating valve performed at both test frequencies as the most efficient pump, producing sufficiently large cyclic body deflections along with the least acoustic noise among all pumps tested. An external gear pump design produced the largest body deflection, but consumes an order of magnitude more power and produced high noise levels. Further refinement remains on determining the suitable oscillation frequencies and inner cavity designs for optimal efficiency and movement.
Publications
R. Katzschmann, A. de Maille, D. Dorhout, D. Rus, “Cyclic Hydraulic Actuation of Soft Robotic Devices,” IROS, Daejeon, Oct. 2016. external page Read Paper