Autonomous Marker-Less Rapid Aerial Grasping
We introduce an autonomous system for rapid aerial grasping using drones, relying solely on vision-based object localization. The system successfully detects and grasps objects with a 94.5% success rate, advancing aerial robotic manipulation towards practical applications in real-world settings such as warehouses and search-and-rescue operations. We present the work at the robotics conference IROS 2023.
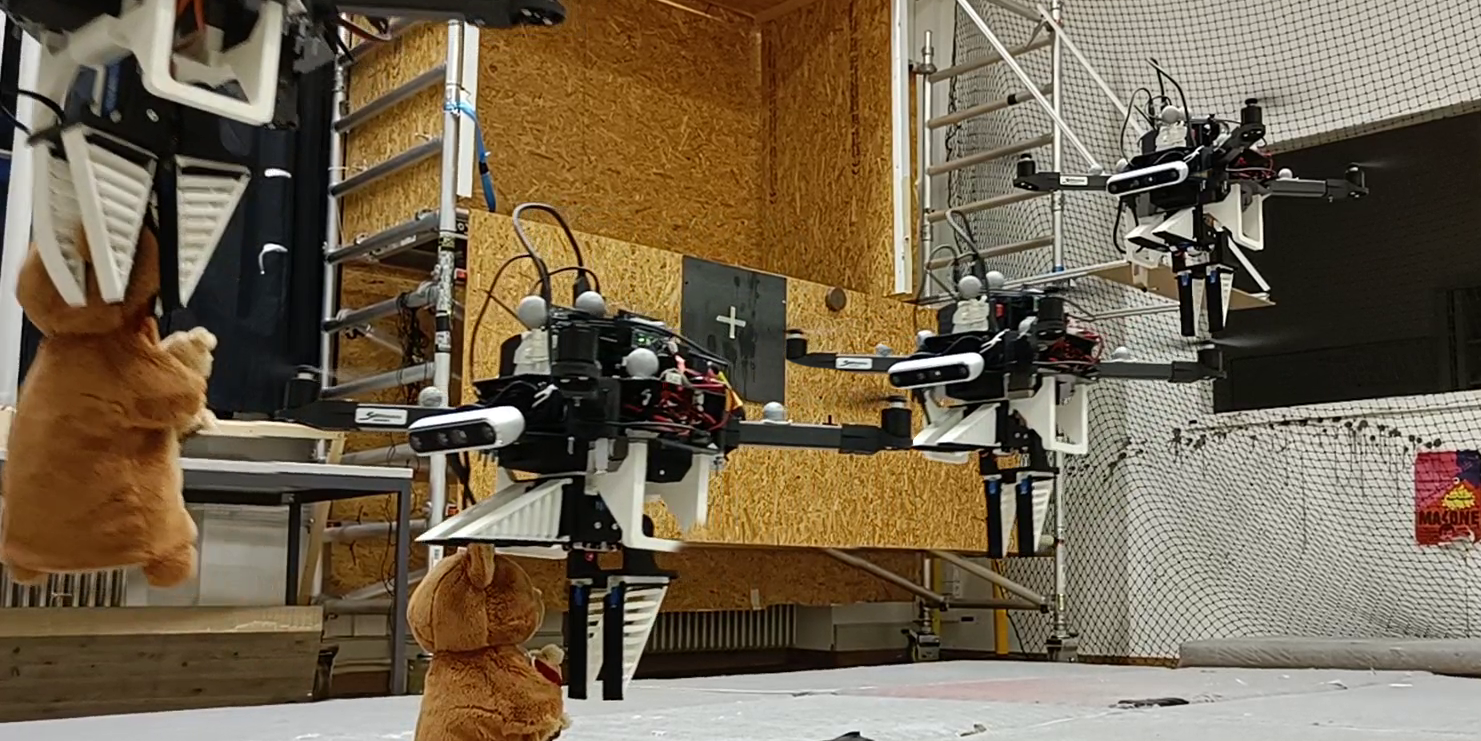
This paper proposes an autonomous vision-based system for aerial grasping using drones, eliminating the need for markers or pre-known object appearances. By combining scene segmentation and depth camera data, the system generates dense point clouds for grasp planning. It achieves a grasping success rate comparable to marker-based systems, demonstrating its potential for autonomous operations in dynamic environments.
external page Link to IEEE Xplore
